Posted by Cat Armato and Callan Hajosy, Program Managers
The 10th International Conference on Learning Representations (ICLR 2022) kicks off this week, bringing together researchers, entrepreneurs, engineers and students alike to discuss and explore the rapidly advancing field of deep learning. Entirely virtual this year, ICLR 2022 offers conference and workshop tracks that present some of the latest research in deep learning and its applications to areas ranging from computer vision, speech recognition and text understanding to robotics, computational biology, and more.
As a Platinum Sponsor of ICLR 2022 and Champion DEI Action Fund contributor, Google will have a robust presence with nearly 100 accepted publications and extensive participation on organizing committees and in workshops. If you have registered for ICLR 2022, we hope you’ll watch our talks and learn about the work done at Google to address complex problems that affect billions of people. Here you can learn more about the research we will be presenting as well as our general involvement at ICLR 2022 (those with Google affiliations in bold).
Senior Area Chairs:
Includes: Been Kim, Dale Schuurmans, Sergey Levine
Area Chairs:
Includes: Adam White, Aditya Menon, Aleksandra Faust, Amin Karbasi, Amir Globerson, Andrew Dai, Balaji Lakshminarayanan, Behnam Neyshabur, Ben Poole, Bhuwan Dhingra, Bo Dai, Boqing Gong, Cristian Sminchisescu, David Ha, David Woodruff, Denny Zhou, Dipanjan Das, Dumitru Erhan, Dustin Tran, Emma Strubell, Eunsol Choi, George Dahl, George Tucker, Hanie Sedghi, Heinrich Jiang, Hossein Mobahi, Hugo Larochelle, Izhak Shafran, Jasper Snoek, Jean-Philippe Vert, Jeffrey Pennington, Justin Gilmer, Karol Hausman, Kevin Swersky, Krzysztof Choromanski, Mathieu Blondel, Matt Kusner, Michael Ryoo, Ming-Hsuan Yang, Minmin Chen, Mirella Lapata, Mohammad Ghavamzadeh, Mohammad Norouzi, Naman Agarwal, Nicholas Carlini, Olivier Bachem, Piyush Rai, Prateek Jain, Quentin Berthet, Richard Nock, Rose Yu, Sewoong Oh, Silvio Lattanzi, Slav Petrov, Srinadh Bhojanapalli, Tim Salimans, Ting Chen, Tong Zhang, Vikas Sindhwani, Weiran Wang, William Cohen, Xiaoming Liu
Workflow Chairs:
Includes: Yaguang Li
Diversity Equity & Inclusion Chairs:
Includes: Rosanne Liu
Invited Talks
Beyond Interpretability: Developing a Language to Shape Our Relationships with AI
Google Speaker: Been Kim
Do You See What I See? Large-Scale Learning from Multimodal Videos
Google Speaker: Cordelia Schmid
Publications
Hyperparameter Tuning with Renyi Differential Privacy – 2022 Outstanding Paper Award
Nicolas Papernot, Thomas Steinke
MIDI-DDSP: Detailed Control of Musical Performance via Hierarchical Modeling
Yusong Wu, Ethan Manilow, Yi Deng, Rigel Swavely, Kyle Kastner, Tim Cooijmans, Aaron Courville, Cheng-Zhi Anna Huang, Jesse Engel
The Information Geometry of Unsupervised Reinforcement Learning
Benjamin Eysenbach, Ruslan Salakhutdinov, Sergey Levine
Learning Strides in Convolutional Neural Networks – 2022 Outstanding Paper Award
Rachid Riad*, Olivier Teboul, David Grangier, Neil Zeghidour
Poisoning and Backdooring Contrastive Learning
Nicholas Carlini, Andreas Terzis
Coordination Among Neural Modules Through a Shared Global Workspace
Anirudh Goyal, Aniket Didolkar, Alex Lamb, Kartikeya Badola, Nan Rosemary Ke, Nasim Rahaman, Jonathan Binas, Charles Blundell, Michael Mozer, Yoshua Bengio
Fine-Tuned Language Models Are Zero-Shot Learners (see the blog post)
Jason Wei, Maarten Bosma, Vincent Y. Zhao, Kelvin Guu, Adams Wei Yu, Brian Lester, Nan Du, Andrew M. Dai, Quoc V. Le
Large Language Models Can Be Strong Differentially Private Learners
Xuechen Li, Florian Tramèr, Percy Liang, Tatsunori Hashimoto
Progressive Distillation for Fast Sampling of Diffusion Models
Tim Salimans, Jonathan Ho
Exploring the Limits of Large Scale Pre-training
Samira Abnar, Mostafa Dehghani, Behnam Neyshabur, Hanie Sedghi
Scarf: Self-Supervised Contrastive Learning Using Random Feature Corruption
Dara Bahri, Heinrich Jiang, Yi Tay, Donald Metzler
Scalable Sampling for Nonsymmetric Determinantal Point Processes
Insu Han, Mike Gartrell, Jennifer Gillenwater, Elvis Dohmatob, Amin Karbasi
When Vision Transformers Outperform ResNets without Pre-training or Strong Data Augmentations
Xiangning Chen, Cho-Jui Hsieh, Boqing Gong
ViTGAN: Training GANs with Vision Transformers
Kwonjoon Lee, Huiwen Chang, Lu Jiang, Han Zhang, Zhuowen Tu, Ce Liu
Generalized Decision Transformer for Offline Hindsight Information Matching
Hiroki Furuta, Yutaka Matsuo, Shixiang Shane Gu
The MultiBERTs: BERT Reproductions for Robustness Analysis
Thibault Sellam, Steve Yadlowsky, Ian Tenney, Jason Wei, Naomi Saphra, Alexander D’Amour, Tal Linzen, Jasmijn Bastings, Iulia Turc, Jacob Eisenstein, Dipanjan Das, Ellie Pavlick
Scaling Laws for Neural Machine Translation
Behrooz Ghorbani, Orhan Firat, Markus Freitag, Ankur Bapna, Maxim Krikun, Xavier Garcia, Ciprian Chelba, Colin Cherry
Interpretable Unsupervised Diversity Denoising and Artefact Removal
Mangal Prakash, Mauricio Delbracio, Peyman Milanfar, Florian Jug
Understanding Latent Correlation-Based Multiview Learning and Self-Supervision: An Identifiability Perspective
Qi Lyu, Xiao Fu, Weiran Wang, Songtao Lu
Memorizing Transformers
Yuhuai Wu, Markus N. Rabe, DeLesley Hutchins, Christian Szegedy
Churn Reduction via Distillation
Heinrich Jiang, Harikrishna Narasimhan, Dara Bahri, Andrew Cotter, Afshin Rostamizadeh
DR3: Value-Based Deep Reinforcement Learning Requires Explicit Regularization
Aviral Kumar, Rishabh Agarwal, Tengyu Ma, Aaron Courville, George Tucker, Sergey Levine
Path Auxiliary Proposal for MCMC in Discrete Space
Haoran Sun, Hanjun Dai, Wei Xia, Arun Ramamurthy
On the Relation Between Statistical Learning and Perceptual Distances
Alexander Hepburn, Valero Laparra, Raul Santos-Rodriguez, Johannes Ballé, Jesús Malo
Possibility Before Utility: Learning And Using Hierarchical Affordances
Robby Costales, Shariq Iqbal, Fei Sha
MT3: Multi-Task Multitrack Music Transcription
Josh Gardner*, Ian Simon, Ethan Manilow*, Curtis Hawthorne, Jesse Engel
Bayesian Neural Network Priors Revisited
Vincent Fortuin, Adrià Garriga-Alonso, Sebastian W. Ober, Florian Wenzel, Gunnar Rätsch, Richard E. Turner, Mark van der Wilk, Laurence Aitchison
GradMax: Growing Neural Networks using Gradient Information
Utku Evci, Bart van Merrienboer, Thomas Unterthiner, Fabian Pedregosa, Max Vladymyrov
Scene Transformer: A Unified Architecture for Predicting Future Trajectories of Multiple Agents
Jiquan Ngiam, Benjamin Caine, Vijay Vasudevan, Zhengdong Zhang, Hao-Tien Lewis Chiang, Jeffrey Ling, Rebecca Roelofs, Alex Bewley, Chenxi Liu, Ashish Venugopal, David Weiss, Ben Sapp, Zhifeng Chen, Jonathon Shlens
The Role of Pretrained Representations for the OOD Generalization of RL Agents
Frederik Träuble, Andrea Dittadi, Manuel Wüthrich, Felix Widmaier, Peter Gehler, Ole Winther, Francesco Locatello, Olivier Bachem, Bernhard Schölkopf, Stefan Bauer
Autoregressive Diffusion Models
Emiel Hoogeboom, Alexey A. Gritsenko, Jasmijn Bastings, Ben Poole, Rianne van den Berg, Tim Salimans
The Role of Permutation Invariance in Linear Mode Connectivity of Neural Networks
Rahim Entezari, Hanie Seghi, Olga Saukh, Behnam Neyshabur
DISSECT: Disentangled Simultaneous Explanations via Concept Traversals
Asma Ghandeharioun, Been Kim, Chun-Liang Li, Brendan Jou, Brian Eoff, Rosalind W. Picard
Anisotropic Random Feature Regression in High Dimensions
Gabriel C. Mel, Jeffrey Pennington
Open-Vocabulary Object Detection via Vision and Language Knowledge Distillation
Xiuye Gu, Tsung-Yi Lin*, Weicheng Kuo, Yin Cui
MCMC Should Mix: Learning Energy-Based Model with Flow-Based Backbone
Erik Nijkamp*, Ruiqi Gao, Pavel Sountsov, Srinivas Vasudevan, Bo Pang, Song-Chun Zhu, Ying Nian Wu
Effect of Scale on Catastrophic Forgetting in Neural Networks
Vinay Ramasesh, Aitor Lewkowycz, Ethan Dyer
Incremental False Negative Detection for Contrastive Learning
Tsai-Shien Chen, Wei-Chih Hung, Hung-Yu Tseng, Shao-Yi Chien, Ming-Hsuan Yang
Towards Evaluating the Robustness of Neural Networks Learned by Transduction
Jiefeng Chen, Xi Wu, Yang Guo, Yingyu Liang, Somesh Jha
What Do We Mean by Generalization in Federated Learning?
Honglin Yuan*, Warren Morningstar, Lin Ning, Karan Singhal
ViDT: An Efficient and Effective Fully Transformer-Based Object Detector
Hwanjun Song, Deqing Sun, Sanghyuk Chun, Varun Jampani, Dongyoon Han, Byeongho Heo, Wonjae Kim, Ming-Hsuan Yang
Measuring CLEVRness: Black-Box Testing of Visual Reasoning Models
Spyridon Mouselinos, Henryk Michalewski, Mateusz Malinowski
Wisdom of Committees: An Overlooked Approach To Faster and More Accurate Models (see the blog post)
Xiaofang Wang, Dan Kondratyuk, Eric Christiansen, Kris M. Kitani, Yair Alon (prev. Movshovitz-Attias), Elad Eban
Leveraging Unlabeled Data to Predict Out-of-Distribution Performance
Saurabh Garg*, Sivaraman Balakrishnan, Zachary C. Lipton, Behnam Neyshabur, Hanie Sedghi
Data-Driven Offline Optimization for Architecting Hardware Accelerators (see the blog post)
Aviral Kumar, Amir Yazdanbakhsh, Milad Hashemi, Kevin Swersky, Sergey Levine
Diurnal or Nocturnal? Federated Learning of Multi-branch Networks from Periodically Shifting Distributions
Chen Zhu*, Zheng Xu, Mingqing Chen, Jakub Konecny, Andrew Hard, Tom Goldstein
Policy Gradients Incorporating the Future
David Venuto, Elaine Lau, Doina Precup, Ofir Nachum
Discrete Representations Strengthen Vision Transformer Robustness
Chengzhi Mao*, Lu Jiang, Mostafa Dehghani, Carl Vondrick, Rahul Sukthankar, Irfan Essa
SimVLM: Simple Visual Language Model Pretraining with Weak Supervision (see the blog post)
Zirui Wang, Jiahui Yu, Adams Wei Yu, Zihang Dai, Yulia Tsvetkov, Yuan Cao
Neural Stochastic Dual Dynamic Programming
Hanjun Dai, Yuan Xue, Zia Syed, Dale Schuurmans, Bo Dai
PolyLoss: A Polynomial Expansion Perspective of Classification Loss Functions
Zhaoqi Leng, Mingxing Tan, Chenxi Liu, Ekin Dogus Cubuk, Xiaojie Shi, Shuyang Cheng, Dragomir Anguelov
Information Prioritization Through Empowerment in Visual Model-Based RL
Homanga Bharadhwaj*, Mohammad Babaeizadeh, Dumitru Erhan, Sergey Levine
Value Function Spaces: Skill-Centric State Abstractions for Long-Horizon Reasoning
Dhruv Shah, Peng Xu, Yao Lu, Ted Xiao, Alexander Toshev, Sergey Levine, Brian Ichter
Understanding and Leveraging Overparameterization in Recursive Value Estimation
Chenjun Xiao, Bo Dai, Jincheng Mei, Oscar Ramirez, Ramki Gummadi, Chris Harris, Dale Schuurmans
The Efficiency Misnomer
Mostafa Dehghani, Anurag Arnab, Lucas Beyer, Ashish Vaswani, Yi Tay
On the Role of Population Heterogeneity in Emergent Communication
Mathieu Rita, Florian Strub, Jean-Bastien Grill, Olivier Pietquin, Emmanuel Dupoux
No One Representation to Rule Them All: Overlapping Features of Training Methods
Raphael Gontijo-Lopes, Yann Dauphin, Ekin D. Cubuk
Data Poisoning Won’t Save You From Facial Recognition
Evani Radiya-Dixit, Sanghyun Hong, Nicholas Carlini, Florian Tramèr
AdaMatch: A Unified Approach to Semi-Supervised Learning and Domain Adaptation
David Berthelot, Rebecca Roelofs, Kihyuk Sohn, Nicholas Carlini, Alex Kurakin
Maximum Entropy RL (Provably) Solves Some Robust RL Problems
Benjamin Eysenbach, Sergey Levine
Auto-scaling Vision Transformers Without Training
Wuyang Chen, Wei Huang, Xianzhi Du, Xiaodan Song, Zhangyang Wang, Denny Zhou
Optimizing Few-Step Diffusion Samplers by Gradient Descent
Daniel Watson, William Chan, Jonathan Ho, Mohammad Norouzi
ExT5: Towards Extreme Multi-Task Scaling for Transfer Learning
Vamsi Aribandi, Yi Tay, Tal Schuster, Jinfeng Rao, Huaixiu Steven Zheng, Sanket Vaibhav Mehta, Honglei Zhuang, Vinh Q. Tran, Dara Bahri, Jianmo Ni, Jai Gupta, Kai Hui, Sebastian Ruder, Donald Metzler
Fortuitous Forgetting in Connectionist Networks
Hattie Zhou, Ankit Vani, Hugo Larochelle, Aaron Courville
Evading Adversarial Example Detection Defenses with Orthogonal Projected Gradient Descent
Oliver Bryniarski, Nabeel Hingun, Pedro Pachuca, Vincent Wang, Nicholas Carlini
Benchmarking the Spectrum of Agent Capabilities
Danijar Hafner
Charformer: Fast Character Transformers via Gradient-Based Subword Tokenization
Yi Tay, Vinh Q. Tran, Sebastian Ruder, Jai Gupta, Hyung Won Chung, Dara Bahri, Zhen Qin, Simon Baumgartner, Cong Yu, Donald Metzler
Mention Memory: Incorporating Textual Knowledge into Transformers Through Entity Mention Attention
Michiel de Jong, Yury Zemlyanskiy, Nicholas FitzGerald, Fei Sha, William Cohen
Eigencurve: Optimal Learning Rate Schedule for SGD on Quadratic Objectives with Skewed Hessian Spectrums
Rui Pan, Haishan Ye, Tong Zhang
Scale Efficiently: Insights from Pre-training and Fine-Tuning Transformers
Yi Tay, Mostafa Dehghani, Jinfeng Rao, William Fedus, Samira Abnar, Hyung Won Chung, Sharan Narang, Dani Yogatama, Ashish Vaswani, Donald Metzler
Omni-Scale CNNs: A Simple and Effective Kernel Size Configuration for Time Series Classification
Wensi Tang, Guodong Long, Lu Liu,Tianyi Zhou, Michael Blumenstein, Jing Jiang
Embedded-Model Flows: Combining the Inductive Biases of Model-Free Deep Learning and Explicit Probabilistic Modeling
Gianluigi Silvestri, Emily Fertig, Dave Moore, Luca Ambrogioni
Post Hoc Explanations May be Ineffective for Detecting Unknown Spurious Correlation
Julius Adebayo, Michael Muelly, Hal Abelson, Been Kim
Axiomatic Explanations for Visual Search, Retrieval, and Similarity Learning
Mark Hamilton, Scott Lundberg, Stephanie Fu, Lei Zhang, William T. Freeman
Pix2seq: A Language Modeling Framework for Object Detection (see the blog post)
Ting Chen, Saurabh Saxena, Lala Li, David J. Fleet, Geoffrey Hinton
Mirror Descent Policy Optimization
Manan Tomar, Lior Shani, Yonathan Efroni, Mohammad Ghavamzadeh
CodeTrek: Flexible Modeling of Code Using an Extensible Relational Representation
Pardis Pashakhanloo, Aaditya Naik, Yuepeng Wang, Hanjun Dai, Petros Maniatis, Mayur Naik
Conditional Object-Centric Learning From Video
Thomas Kipf, Gamaleldin F. Elsayed, Aravindh Mahendran, Austin Stone, Sara Sabour, Georg Heigold, Rico Jonschkowski, Alexey Dosovitskiy, Klaus Greff
A Loss Curvature Perspective on Training Instabilities of Deep Learning Models
Justin Gilmer, Behrooz Ghorbani, Ankush Garg, Sneha Kudugunta, Behnam Neyshabur, David Cardoze, George E. Dahl, Zack Nado, Orhan Firat
Autonomous Reinforcement Learning: Formalism and Benchmarking
Archit Sharma, Kelvin Xu, Nikhil Sardana, Abhishek Gupta, Karol Hausman, Sergey Levine, Chelsea Finn
TRAIL: Near-Optimal Imitation Learning with Suboptimal Data
Mengjiao Yang, Sergey Levine, Ofir Nachum
Minimax Optimization With Smooth Algorithmic Adversaries
Tanner Fiez, Lillian J. Ratliff, Chi Jin, Praneeth Netrapalli
Unsupervised Semantic Segmentation by Distilling Feature Correspondences
Mark Hamilton, Zhoutong Zhang, Bharath Hariharan, Noah Snavely, William T. Freeman
InfinityGAN: Towards Infinite-Pixel Image Synthesis
Chieh Hubert Lin, Hsin-Ying Lee, Yen-Chi Cheng, Sergey Tulyakov, Ming-Hsuan Yang
Shuffle Private Stochastic Convex Optimization
Albert Cheu, Matthew Joseph, Jieming Mao, Binghui Peng
Hybrid Random Features
Krzysztof Choromanski, Haoxian Chen, Han Lin, Yuanzhe Ma, Arijit Sehanobish, Deepali Jain, Michael S Ryoo, Jake Varley, Andy Zeng, Valerii Likhosherstov, Dmitry Kalashnikov, Vikas Sindhwani, Adrian Weller
Vector-Quantized Image Modeling With Improved VQGAN
Jiahui Yu, Xin Li, Jing Yu Koh, Han Zhang, Ruoming Pang, James Qin, Alexander Ku, Yuanzhong Xu, Jason Baldridge, Yonghui Wu
On the Benefits of Maximum Likelihood Estimation for Regression and Forecasting
Pranjal Awasthi, Abhimanyu Das, Rajat Sen, Ananda Theertha Suresh
Surrogate Gap Minimization Improves Sharpness-Aware Training
Juntang Zhuang*, Boqing Gong, Liangzhe Yuan, Yin Cui, Hartwig Adam, Nicha C. Dvornek, Sekhar Tatikonda, James S. Duncan, Ting Liu
Online Target Q-learning With Reverse Experience Replay: Efficiently Finding the Optimal Policy for Linear MDPs
Naman Agarwal, Prateek Jain, Dheeraj Nagaraj, Praneeth Netrapalli, Syomantak Chaudhuri
CrossBeam: Learning to Search in Bottom-Up Program Synthesis
Kensen Shi, Hanjun Dai, Kevin Ellis, Charles Sutton
Workshops
Workshop on the Elements of Reasoning: Objects, Structure, and Causality (OSC)
Organizers include: Klaus Greff, Thomas Kipf
Workshop on Agent Learning in Open-Endedness
Organizers include: Krishna Srinivasan
Speakers include: Natasha Jaques, Danijar Hafner
Wiki-M3L: Wikipedia and Multi-modal & Multi-lingual Research
Organizers include: Klaus Greff, Thomas Kipf
Speakers include: Jason Baldridge, Tom Duerig
Setting Up ML Evaluation Standards to Accelerate Progress
Organizers include: Rishabh Agarwal
Speakers and Panelists include: Katherine Heller, Sara Hooker, Corinna Cortes
From Cells to Societies: Collective Learning Across Scales
Organizers include: Mark Sandler, Max Vladymyrov
Speakers include: Blaise Aguera y Arcas, Alexander Mordvintsev, Michael Mozer
Emergent Communication: New Frontiers
Speakers include: Natasha Jaques
Deep Learning for Code
Organizers include: Jonathan Herzig
GroundedML: Anchoring Machine Learning in Classical Algorithmic Theory
Speakers include: Gintare Karolina Dziugaite
Generalizable Policy Learning in the Physical World
Speakers and Panelists include: Mrinal Kalakrishnan
CoSubmitting Summer (CSS) Workshop
Organizers include: Rosanne Liu
*Work done while at Google. ↩

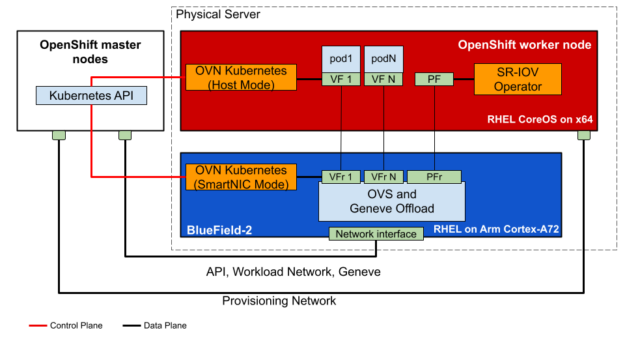
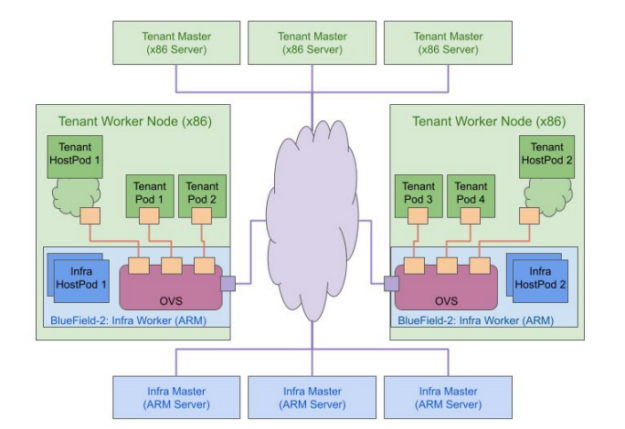
") Take a deep dive into the integrated cloud-ready infrastructure solution from Red Hat and NVIDIA
Take a deep dive into the integrated cloud-ready infrastructure solution from Red Hat and NVIDIA 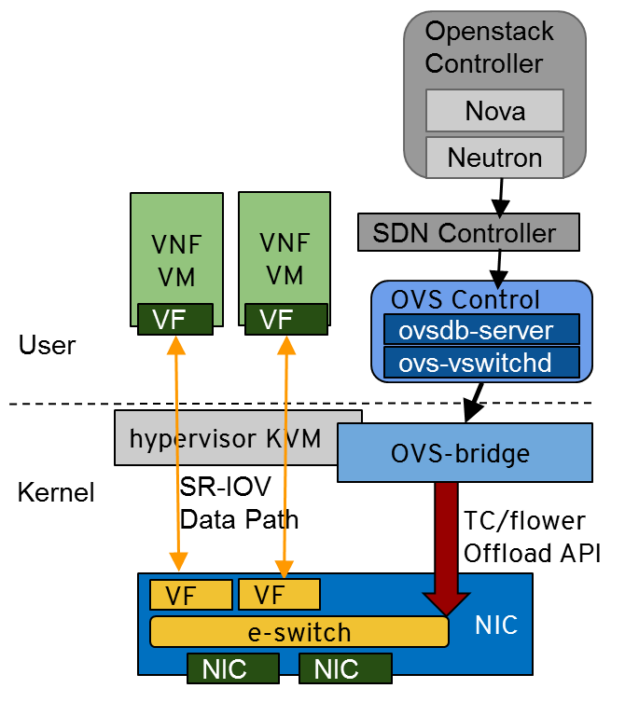


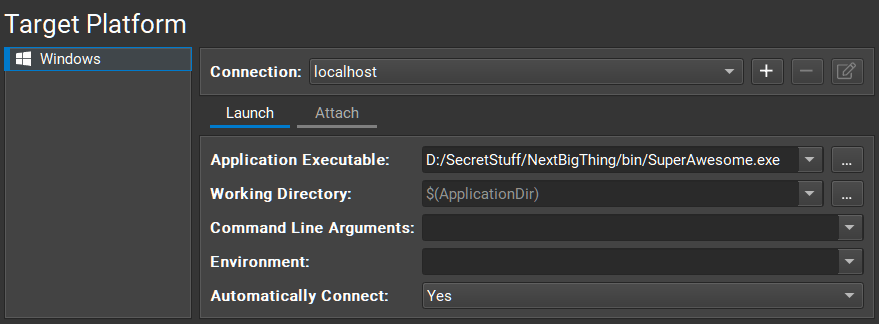
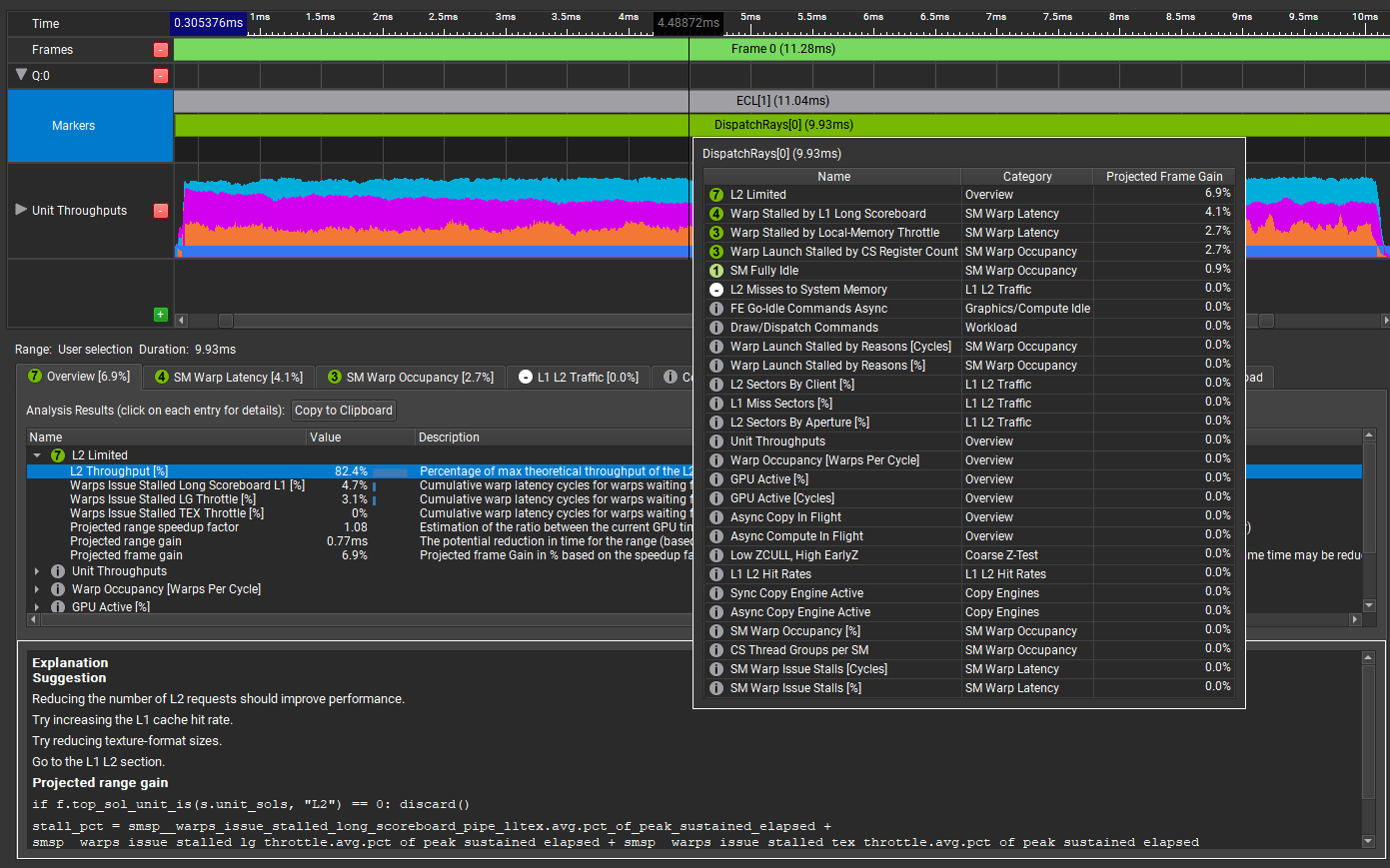
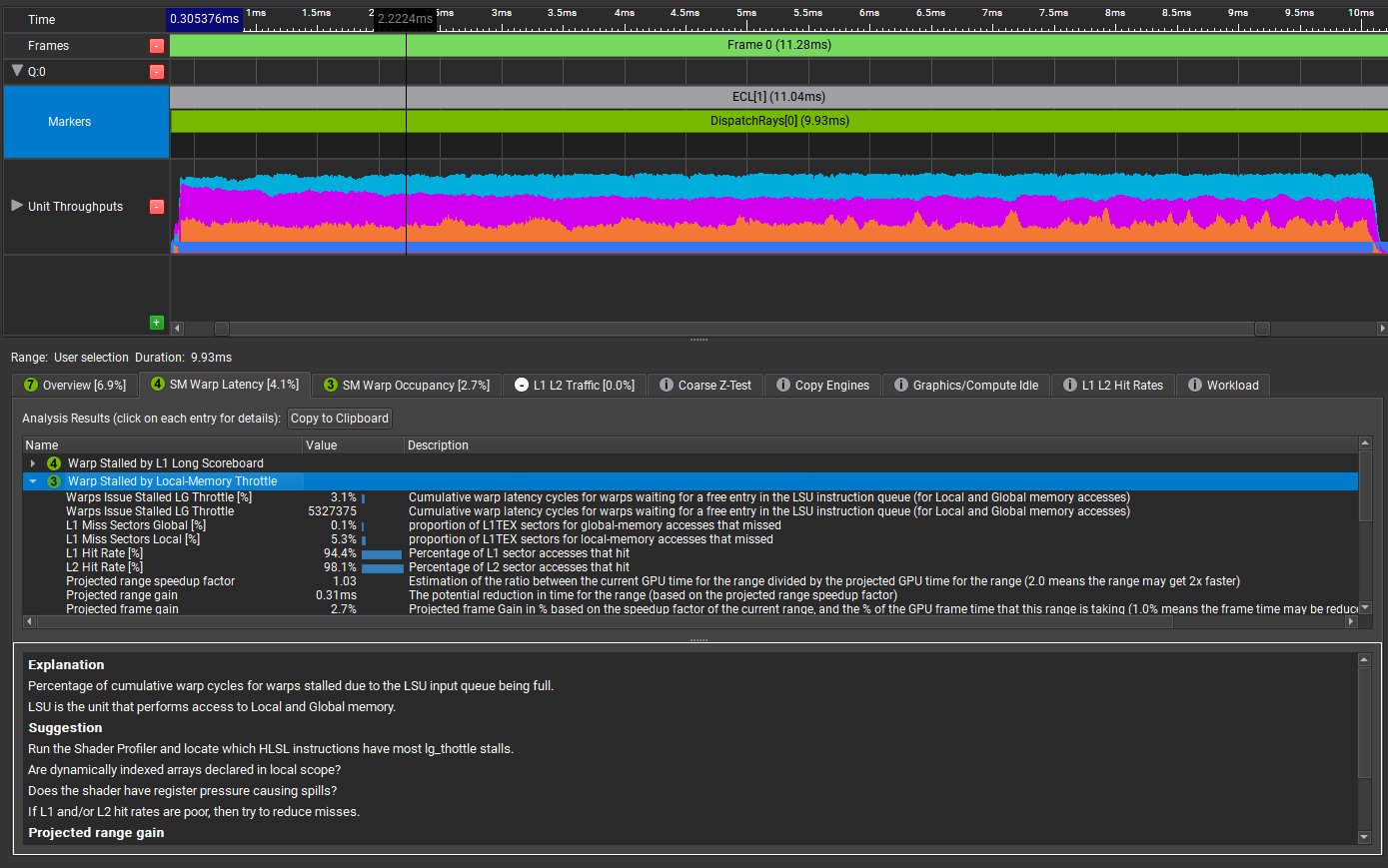
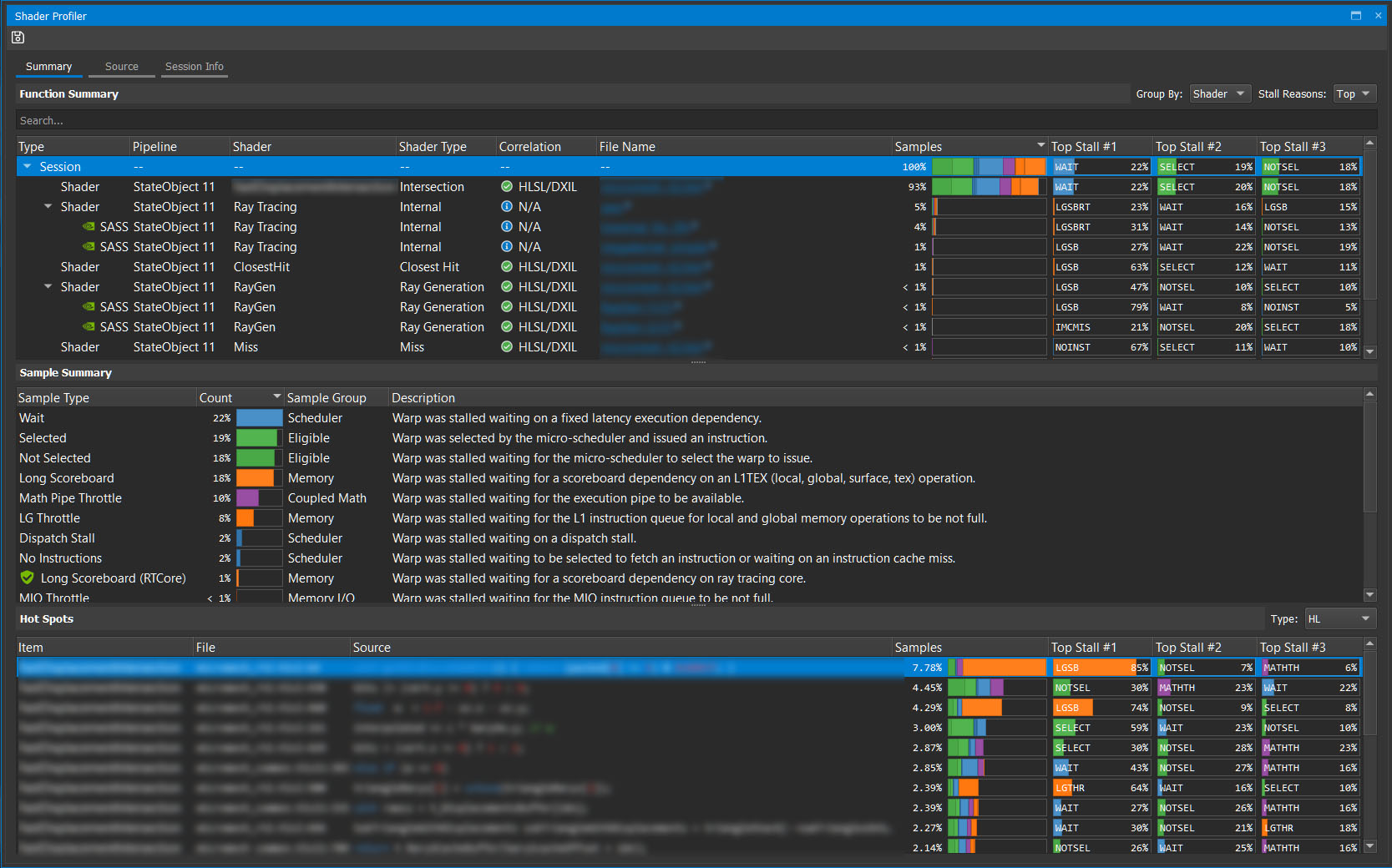
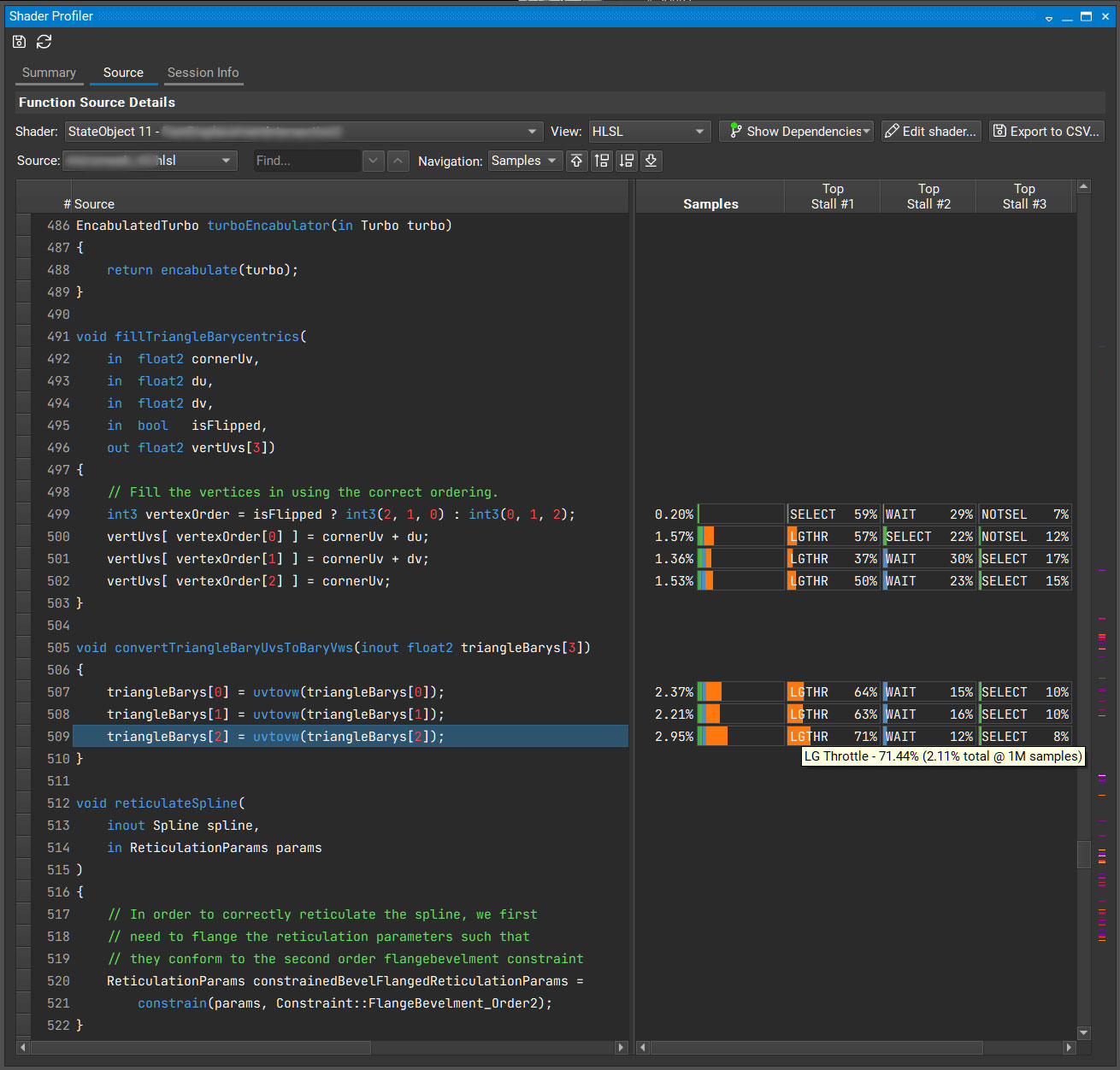
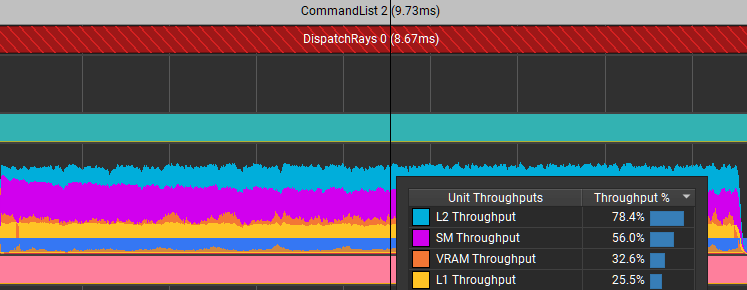
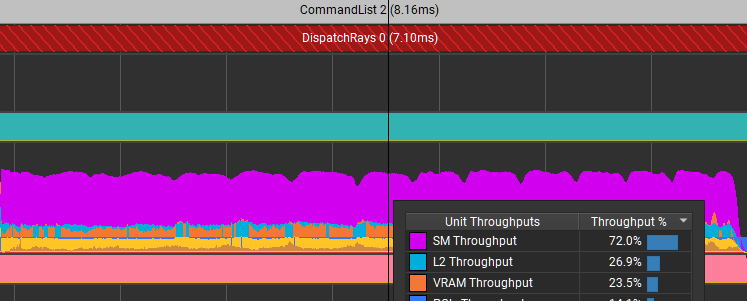
 This is a deep dive into the Shader Profiler feature of NVIDIA Nsight Graphics. The Shader Profiler allows you to find hotspots in your shaders and why they’re hot.
This is a deep dive into the Shader Profiler feature of NVIDIA Nsight Graphics. The Shader Profiler allows you to find hotspots in your shaders and why they’re hot.