Corrupt JPEG data: 242 extraneous bytes before marker 0xd9
Corrupt JPEG data: 217 extraneous bytes before marker 0xd9
Corrupt JPEG data: 133 extraneous bytes before marker 0xd9
Even though I implemented 3 different methods to check for and remove corrupt image files… So I have no idea why I’m still getting this error. Please help!
CODE:
#check for corrupted files (method 1)
from pathlib import Path
import imghdr
classes = [‘Cat’,’Dog’]
image_extensions = [“.png”, “.jpg”] # add there all your images file extensions
for item in classes:
data_dir = f’kagglecatsanddogs_5340/PetImages/{item}’
img_type_accepted_by_tf = [“bmp”, “gif”, “jpeg”, “png”]
for filepath in Path(data_dir).rglob(“*”):
if filepath.suffix.lower() in image_extensions:
img_type = imghdr.what(filepath)
if img_type is None:
print(f”{filepath} is not an image”)
# remove image
os.remove(filepath)
print(f”successfully removed {filepath}”)
elif img_type not in img_type_accepted_by_tf:
print(f”{filepath} is a {img_type}, not accepted by TensorFlow”)
try:
img = Image.open(filepath) # open the image file
img.verify() # verify that it is, in fact an image
# print(‘valid image’)
except Exception:
print(‘Bad file:’, filepath)
# method 2
import glob
img_paths = glob.glob(os.path.join(‘kagglecatsanddogs_5340/PetImages/Dog’,’*/*.*’)) # assuming you point to the directory containing the label folders.
bad_paths = []
for image_path in img_paths:
try:
img_bytes = tf.io.read_file(image_path)
decoded_img = tf.decode_image(img_bytes)
except Exception:
print(f”Found bad path {image_path}”)
bad_paths.append(image_path)
print(f”{image_path}: OK”)
print(“BAD PATHS:”)
for bad_path in bad_paths:
print(f”{bad_path}”)
# method 3
num_skipped = 0
for folder_name in (“Cat”, “Dog”):
folder_path = os.path.join(“kagglecatsanddogs_5340/PetImages”, folder_name)
for fname in os.listdir(folder_path):
fpath = os.path.join(folder_path, fname)
try:
fobj = open(fpath, “rb”)
is_jfif = tf.compat.as_bytes(“JFIF”) in fobj.peek(10)
finally:
fobj.close()
if not is_jfif:
num_skipped += 1
# Delete corrupted image
os.remove(fpath)
print(“Deleted %d images” % num_skipped)
def normalize(x,y):
x = tf.cast(x,tf.float32) / 255.0
return x, y
def convert_to_categorical(input):
if input == 1:
return “Dog”
else:
return “Cat”
def to_list(ds):
ds_list = []
for sample in ds:
image, label = sample
ds_list.append((image, label))
return ds_list
# normalize data
ds_train.map(normalize)
ds_test.map(normalize)
# plot 10 random images from training set
num = len(ds_train)
ds_train_list = to_list(ds_train)
for i in range(1,11):
random_index = np.random.randint(num)
img, label = ds_train_list[random_index]
label = convert_to_categorical(np.array(label))
img = np.reshape(img,(300,300,3))
plt.subplot(2,5,i)
plt.imshow(img)
plt.title(label)
plt.savefig(‘figures/example_images.png’)
I’m trying to plot a few example images using Matplotlib from a cats and dogs Kaggle dataset that I loaded into the script using TensorFlow’s import_image_dataset_from_directory, but the images aren’t displaying correctly. The Matplotlib plots are either empty or contain some speckled blue or yellow dots… Does anyone know how to fix this? (code below)
def normalize(x,y):
x = tf.cast(x,tf.float32) / 255.0
return x, y
def convert_to_categorical(input):
if input == 1:
return “Dog”
else:
return “Cat”
def to_list(ds):
ds_list = []
for sample in ds:
image, label = sample
ds_list.append((image, label))
return ds_list
# load dataset
directory = ‘train’
ds_train = tf.keras.utils.image_dataset_from_directory(
directory,
labels=’inferred’,
label_mode=’binary’,
batch_size=1,
shuffle=False,
validation_split=0.3,
subset=’training’,
image_size=(300,300)
)
ds_test = tf.keras.utils.image_dataset_from_directory(
directory,
labels=’inferred’,
label_mode=’binary’,
batch_size=1,
shuffle=False,
validation_split=0.3,
subset=’validation’,
image_size=(300,300)
)
# normalize data
ds_train.map(normalize)
ds_test.map(normalize)
# plot 10 random images from training set
num = len(ds_train)
ds_train_list = to_list(ds_train)
for i in range(1,11):
random_index = np.random.randint(num)
img, label = ds_train_list[random_index]
label = convert_to_categorical(np.array(label))
img = np.reshape(img,(300,300,3))
plt.subplot(2,5,i)
plt.imshow(img)
plt.title(label)
plt.savefig(‘figures/example_images.png’)
I m a newbie when it comes to deep learning, but I am trying to use a code from git and train the network on my own data. however, it takes forever..it took 80 minutes for 1 epoch, and the number of epoches is 1000. i also tried reducing batch size and using google collab.. please,i dont get what i am doing wrong… at first i tried running on cpu,then on gpu,but i get OOM error even when changing parameters.. any help is appreciated. This is the code : https://github.com/markusaksli/ai-music
The end of 2021 and beginning of 2022 saw the two largest commercial CFD tool vendors, Ansys and Siemens, both launch versions of their flagship CFD tools with support for GPU acceleration.
When a technology reaches the required level of maturity, adoption transitions from those considered visionaries to early majority adopters. Now is such a critical and transitional moment for the largest single segment of industrial high-performance computing (HPC).
The end of 2021 and beginning of 2022 saw the two largest commercial computational fluid dynamics (CFD) tool vendors, Ansys and Siemens, both launch versions of their flagship CFD tools with support for GPU acceleration. This fact alone is enough proof to show the new age of CFD has arrived.
Evolution of engineering applications for CFD
The past decade saw a wider adoption of CFD as a critical tool for engineers and equipment designers to study or predict the behavior of their designs. However CFD isn’t only an analysis tool, it is now used to make design improvements without having to resort to time-consuming and expensive physical testing for every design/operation point that is being evaluated. This ubiquity is part of why there are so many CFD tools, commercial, and open-source software available today.
The growing need for accuracy in simulations to help minimize testing led to the incorporation of multi-physics capabilities into CFD tools, such as the inclusion of heat transfer, mass transfer, chemical reactions, particulate flows, and more. The other reason for the growth of CFD tools is the fact that capturing all the relevant physics for every type of use case within a single tool is time-consuming to build and validate.
For instance, in the use case of vehicle aerodynamics, a digital wind tunnel can be used to study and evaluate the flow over the geometry and to evaluate the drag produced by the designed surface which has direct implications on vehicle performance. Depending on the intended purpose of the simulation, users get to pick if they want to run a steady or a transient simulation using the traditional Navier-Stokes formulation for fluid flow or use alternative frameworks like the lattice Boltzmann method.
Even within the realm of Navier-Stokes solutions, one has a variety of turbulence models and methodologies, such as what scales are resolved and what are modeled, to choose from for the simulations. The complexity in the model quickly grows when additional physics are considered when making design choices, such as studying automotive aeroacoustics which has an influence on customer perception, passenger safety and comfort, or studying road vehicle platooning.
All the tools used for modeling different flow situations take a staggering amount of compute processing power. As organizations are starting to incorporate CFD earlier on in their design cycles, while simultaneously growing the complexity of their models, both in terms of model size and representative physics, to increase the fidelity of the simulations – the industry has reached a tipping point.
Parallelism equates with performance
It is no longer uncommon for a single simulation to require thousands of CPU core hours to provide a result, and a single design product can require 10,000 to 1,000,000 simulations or more.
Just recently, an NVIDIA partner, Resolved Analytics, published a survey on CFD users and tools. One of the statistics shown is the commonly-used levels of parallelism by CFD users today. In CFD, parallel execution refers to dividing the domain or grid into sub-grids and assigning a processing unit to each sub-grid. At each numerical iteration, the sub-grids communicate boundary information with the adjacent sub-grids and the CFD solution advances toward convergence.
The survey finishes with the conclusion that hardware and software costs continue to limit the parallelization of CFD.
Figure 1. Resolved Analytics survey of CFD users
Resolved Analytics surveyed CFD users and found that the overwhelming majority are using fewer than 257 processors, impacting parallel programming capacity:
Getting to higher levels of performance is the right thing to do, because it optimizes the most expensive resource: engineer and researcher time. Often skilled personnel time can be 5–10x the cost of the next most expensive resource, which is software licenses or computing hardware. Logic dictates allocating funding to remove bottlenecks caused by these lower-cost resources.
Another NVIDIA partner, Rescale, stated this perspective in a similar way:
Most HPC economic models ignore engineering time or engineering productivity, and it is the most valuable and expensive resource that needs to be optimized first. Assuring that hardware and software assets keep researchers generating IP at a maximum rate is the most rational way to treat the core value generators of an organization.
NVIDIA is pleased to share with the CFD user community that the hardware limitation is lifting. Recently, the two most popular CFD tools—Simcenter STAR-CCM+ from Siemens Digital Industries Software and Ansys Fluent—have made available software versions to help support specific physics. Those physics simulations can take significant advantage of the extreme speed of accelerated GPU computing.
At the time of this post, the Simcenter STAR-CCM+ 2022.1 GPU-accelerated version is generally available, currently supporting vehicle external aerodynamics applications for steady and unsteady simulations. The Ansys Fluent release is currently in public beta.
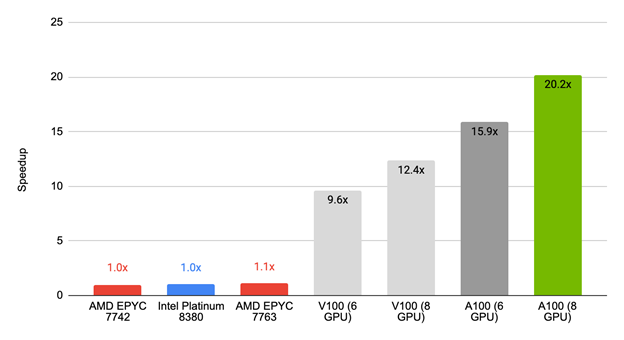
Figure 2. Simcenter STAR-CCM+ 2022.1 performance for model LeMans 104M on GPUs in comparison to CPU-only execution shows the top performing platform, with 20x higher speed, is the NVIDIA A100 PCIe 80GB.
Figure 2 shows the performance of the first release of Simcenter STAR-CCM+ 2022.1 against commonly available CPU-only servers. For the tested benchmark, an NVIDIA GPU-equipped server delivers results almost 20x faster than over 100 cores of CPU.
The AMD EPYC 7763 achieved 10% speedup of 1.1x, compared to the NVIDIA V100 (six GPUs) with a 9.6x speedup, NVIDIA V100 (eight GPUs) with a 12.4x speedup, NVIDIA A100 (six GPUs) with a 15.9x speedup, and NVIDIA A100 (eight GPUs) with a 20.2x speedup.
To put that into more practical terms, this means a simulation that takes a full day on a CPU server could be done in a little over an hour with a single node and eight NVIDIA A100 GPUs.
With the Simcenter STAR-CCM+ team continuing to work on improving and optimizing their GPU offering, you can expect even better performance in upcoming releases.
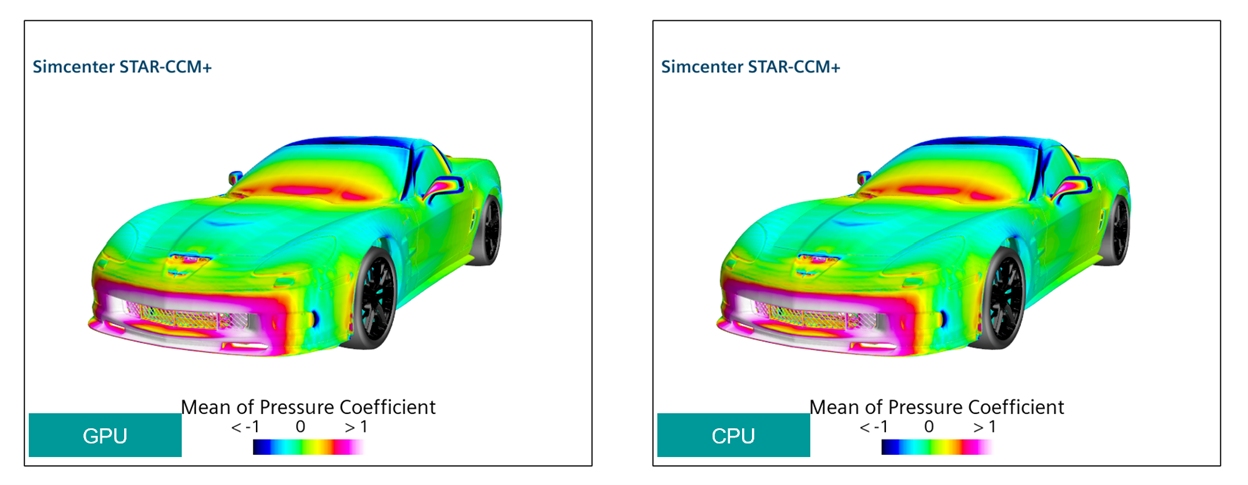
Figure 3. Simcenter STAR-CCM+ results for the mean of pressure coefficient compared between (left)GPU- and (right)CPU-based runs.
Corvette C6 ZR1 external aerodynamics, pseudo-steady simulation, 110M cells run with SST-DDES and Moving Reference Frame (MRF) for the wheels. GPU runs on 4xA100 DGX station.
GPU-accelerated runs are delivering consistent results compared to CPU-only runs, and Siemens delivered a product that can be seamlessly moved from CPUs to GPUs to get the results faster and effortlessly. The result is that you can now run simulations on-premises or on the cloud, as A100 GPU instances are available from all the major cloud service providers.
Siemens showed similar results in their announcement of GPU support in version 2022.1 when comparing CPU-only servers on-premises and in the cloud for both previous-generation V100 GPUs and current generation A100 GPUs. They also showed the performance of a large, industrial-scale model and the equivalent number of CPU cores required to get similar run times as that of a single node with eight GPUs on it.
Never to be left behind on technology trends, NVIDIA and Ansys announced the public beta availability of a GPU-accelerated, limited-functionality Fluent at the 2021 GTC Fall keynote.
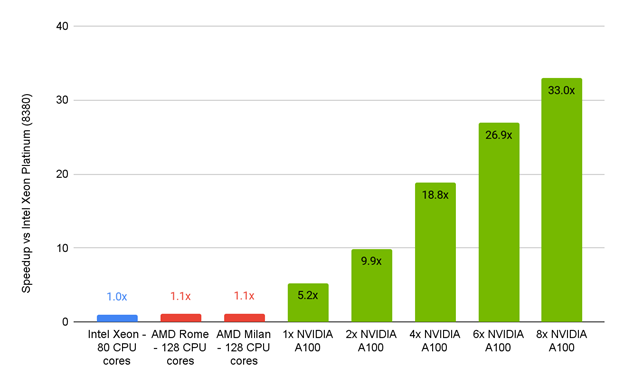
Figure 4. Performance of Ansys FLUENT 2022 beta1 for a 105M cell car model server vs. CPU-only servers.
This comparison is based on a 100-iteration timing, steady-state, GEKO turbulence model.
The performance of the Ansys Fluent 2022 beta1 server compared to CPU-only servers shows that Intel Xeon, AMD Rome, and AMD Milan had ~1.1x speedups compared to the NVIDIA A100 PCIe 80GB, which had speedups from 5.2x (one GPU) to an impressive 33x (eight GPUs).
The Ansys Fluent numbers drove some major excitement. They showed that a single GPU accelerated server for their selected benchmark and associated physics could deliver nearly 33x the performance of the standard Intel processor-only servers common today.
Such fast turnaround times are due to GPU acceleration of the two most used commercial CFD applications. This means that design engineers can not only incorporate simulations earlier into their design cycles but also explore several design iterations within a single day. They can make informed decisions about product performance quickly instead of having to wait for weeks.
Other options for GPU acceleration
At such speeds, other bottlenecks in the product research process can emerge. Sometimes a major consumer of engineering time is preprocessing, or the manual process of building the models to be run.
It is especially important to address this problem because it takes engineering person-time to solve. This is different from other factors, like simulation run time, that leave the researcher free to concentrate on other tasks. This is an active area of focus recently highlighted in CFD Mesh Generators: Top 3 Reasons They Slow Analysis and How to Fix Them.
All that said though, GPU acceleration is not an entirely new phenomenon. Some of the more niche tools have either been born in a GPU-accelerated world or have come to it sooner rather than later:
Altair CFD (NanoFluidX and UltraFluidX)
Cascade Technologies, CharLES
ESS Rocky
CPFD Barracuda
Dassault, XFlow
M-STAR CFD
NASA, FUN3D
NVIDIA has featured exciting and visually stunning results from NASA’s FUN3D tool, including the time Jensen Huang shared a simulation of a Mars lander entering the atmosphere.
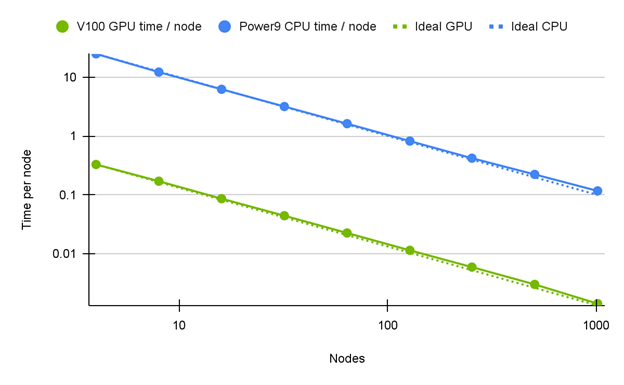
Figure 5. A 72-84x improvement shown for CPU vs. GPU performance of FUN3D version 14.0 (unreleased), courtesy of the NASA FUN3D team.
Hardware access provided by ORNL Summit using IBM AC922 Dual Power9 CPUs with 6x NVIDIA V100 SXM2 16 GB 2x EDR InfiniBand.
The most recent Supercomputing Conference featured research by a team that studied algorithmic changes which produce reductions in floating-point atomic updates required by large-scale parallel GPU computing environments. The runtime of several kernels is dominated by the update speeds, and therefore efficiencies found in this area have the potential for large benefits. Also, though FUN3D is a NASA and United States government-only tool, the discussion in this paper has applicability to other unstructured Reynolds-averaged Navier-Stokes CFD tools.
Beyond savings and removing roadblocks, maybe the most exciting part of mainstream CFD tools becoming GPU-accelerated is the new science and engineering that cut runtimes by factors of 15–30x. Until now, without access to leadership-class supercomputing capabilities, investigations into these areas have been too difficult from both a runtime and a problem-size standpoint:
Vehicle underhood modeling: Turbulent flow with heat transfer
Large eddy and combustion: Needed for detailed environmental emissions modeling
Magneto-hydrodynamics: Flows influenced by magnetic fields important to modeling fusion energy generators, internals of stars and gas giant planets
Machine learning training: Automatic generation of models and solutions that are used to train machine learning algorithms to estimate flow initial conditions, model turbulence, mixing, and so on
For more information about accelerated computing being used for other fluids or industrial simulations, watch the recommended recent GTC 2022 sessions focused on manufacturing and HPC:
It’s a beautiful day to play video games. And it’s GFN Thursday, which means we’ve got those games. Ten total titles join the GeForce NOW library of over 1,300 games, starting with the release of Roller Champions – a speedy, free-to-play roller skating title launching with competitive season 0. Rollin’ Into the Weekend Roll with Read article >
Can machines experience emotions? They might, according to Hume AI, an AI research lab and technology company that aims to “ensure artificial intelligence is built to serve human goals and emotional well-being.” So how can AI genuinely understand how we are feeling, and respond appropriately? On this episode of NVIDIA’s AI Podcast, host Noah Kravitz Read article >
Recalling the French linguist who deciphered the Rosetta Stone 150 years ago, Hewlett Packard Enterprise today switched on a tool to unravel its customers’ knottiest problems. The Champollion AI supercomputer takes its name from Jean-François Champollion (1790-1832), who decoded hieroglyphics that opened a door to study of ancient Egypt’s culture. Like Champollion, the mega-system resides Read article >
We built BenchBot to allow roboticists to spend more time researching the exciting and interesting problems in robotics. This post tells BenchBot’s story.
Working on robotics is full of exciting and interesting problems but also days lost to humbling problems like sensor calibration, building transform trees, managing distributed systems, and debugging bizarre failures in brittle systems.
We also recently upgraded to the new NVIDIA Omniverse-powered NVIDIA Isaac Sim, which has bought a raft of significant improvements to the BenchBot platform. Whether robotics is your hobby, academic pursuit, or job, BenchBot along with NVIDIA Isaac Sim capabilities enables you to jump into the wonderful world of robotics with only a few lines of Python. In this post, we share how we created BenchBot, what it enables, where we plan to take it in the future, and where you can take it in your own work. Our goal is to give you the tools to start working on your own robotics projects and research by presenting ideas about what you can do with BenchBot. We also share what we learned when integrating with the new NVIDIA Isaac Sim.
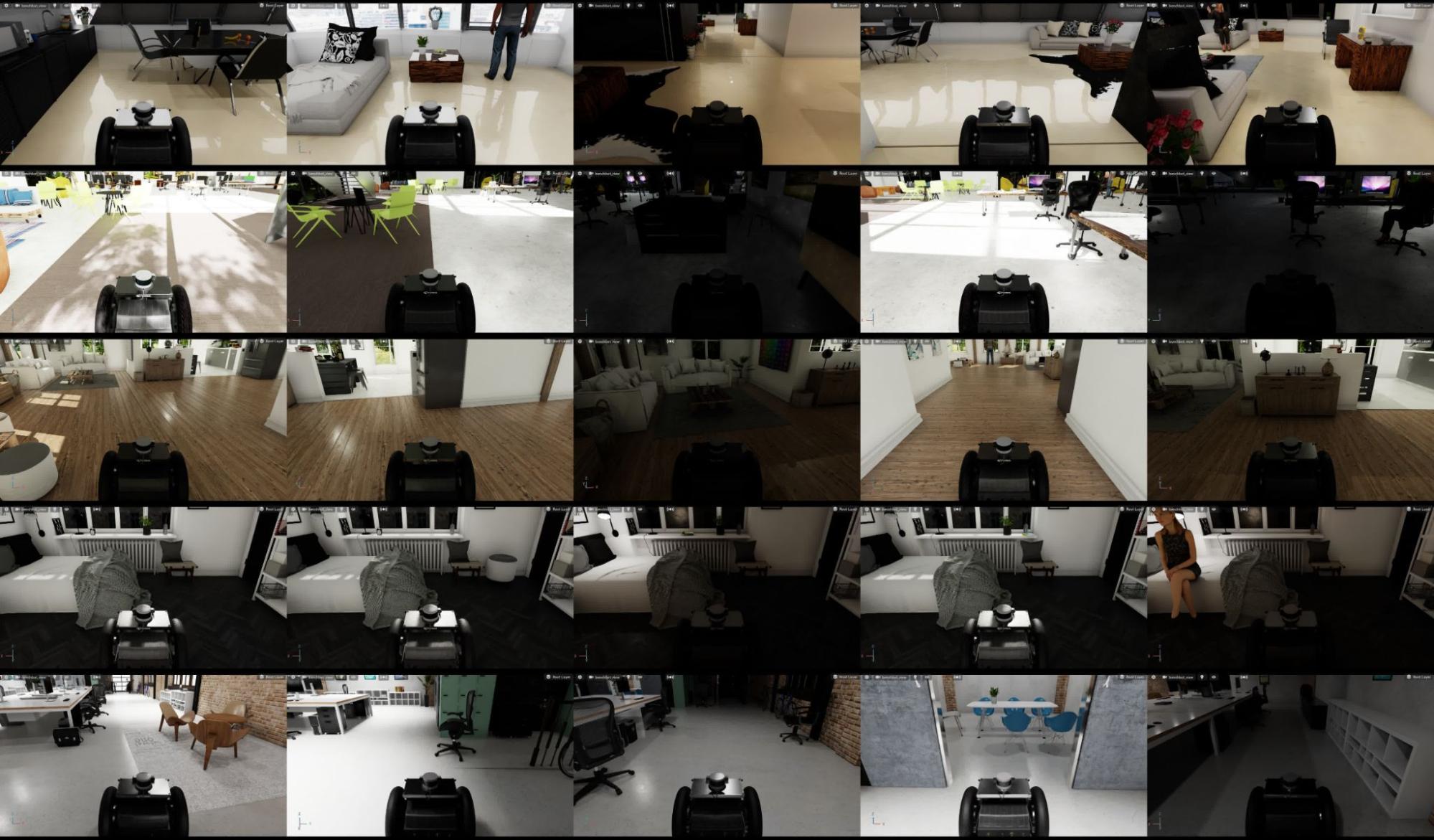
Figure 1. BenchBot gives users access to 25 photorealistic environments out of the box, with variations in lighting and objects present (see the BEAR dataset)
This post also supplies context for our Robotic Vision Scene Understanding (RVSU) challenge, currently in its third iteration. The RVSU challenge is a chance to get hands-on in trying to solve a fundamental problem for domestic robots: how can they understand what is in their environment, and where. By competing, you can win a share in prizes including NVIDIA A6000 GPUs and $2,500 USD cash.
The story behind BenchBot
BenchBot addressed a need in our semantic scene understanding research. We’d hosted an object detection challenge and produced novel evaluation metrics but needed to expand this work to the robotics domain:
What is understanding a scene?
How can the level of understanding be evaluated?
What role does agency play in understanding a scene?
Can understanding in simulation transfer to the real world?
What’s required of a simulation for understanding to transfer to the real world?
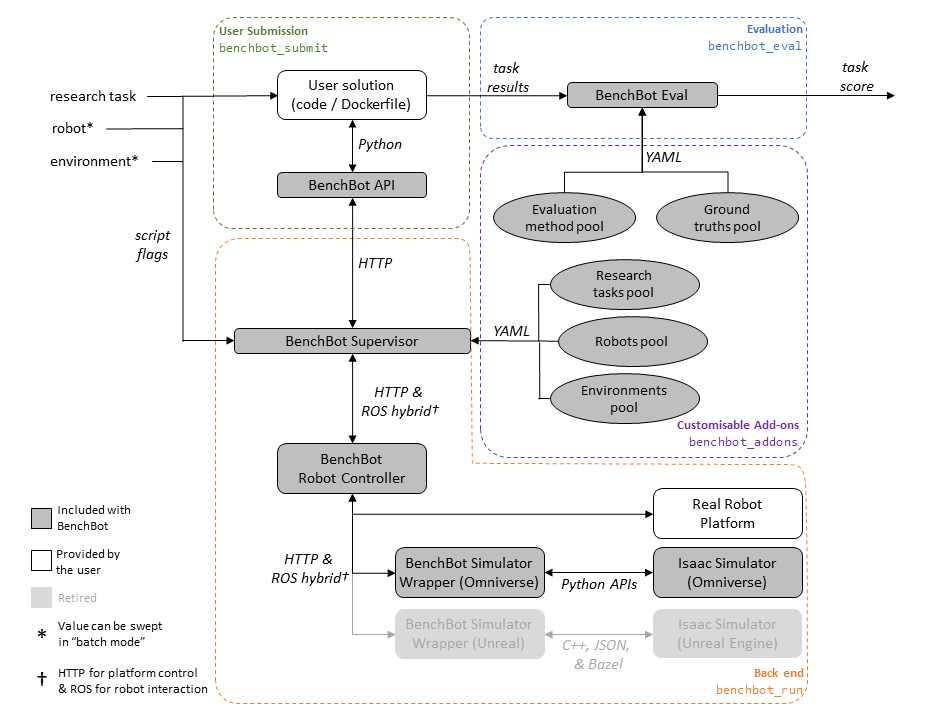
We made the BenchBot platform to enable you to focus on these big questions, without becoming lost in the sea of challenges typically thrown up by robotic systems. BenchBot consists of many moving parts that abstract these operational complexities away (Figure 2).
Figure 2. System overview of the BenchBot platform
Here are some of the key components and features of the BenchBot architecture:
You create solutions to robotics problems by writing a Python script that calls the BenchBot API.
You can easily understand how well your solution performed a given robotics task using customisable evaluation tools.
The supervisor brokers communications between the high-level Python API and low-level interfaces of typical robotic systems.
The supervisor is backend-agnostic. The robot can be real or simulated, it just needs to be running ROS.
All configurations live in a modular add-on system, allowing you to easily extend the system with your own tasks, robots, environments, evaluation methods, examples, and more.
A lot of moving parts isn’t necessarily a good thing if they complicate the user experience, so designing the user experience was also a central focus in developing BenchBot.
There are three basic commands for controlling the system:
With a simple Python API, world-class photorealistic simulation, and only a handful of commands needed to manage the entire system, we were ready to apply BenchBot to our first big output: the RVSU challenge.
RVSU challenge
The RVSU challenge prompts researchers to develop robotic vision systems that understand both the semantic and geometric aspects of the surrounding environment. The challenge consists of six tasks, featuring multiple difficulty levels for object-based, semantic, simultaneous localization and mapping (SLAM) and scene change detection (SCD).
The challenge also focuses on a core requirement for household robots: they need to understand what objects are in their environment, and where they are. This problem in itself is the first challenge captured in our semantic SLAM tasks, where a robot must explore an environment, find all objects of interest, and add them to a 3D map.
The SCD task takes this a step further, asking a robot to report changes to the objects in the environment at a different point in time. My colleague David Hall presented an excellent overview of the challenge in the following video.
Video 1. Scene Understanding Challenges
Bringing the RVSU challenge to life with NVIDIA Isaac Sim
Recently, we upgraded BenchBot from using the old Unreal Engine-based NVIDIA Isaac Sim to the new Omniverse-powered NVIDIA Isaac Sim. This brought a number of key benefits to BenchBot, leaving us excited about where we can go with Omniverse-powered simulations in the future. The areas in which we saw significant benefits included the following:
Quality: NVIDIA RTX rendering produced beautiful photorealistic simulations, all with the same assets that we were using before.
Performance: We accessed powerful dynamic lighting effects, with intricately mapped reflections, all produced in real-time for live simulation with realistic physics.
Customizability: The Python APIs for Omniverse and NVIDIA Isaac Sim give complete control of the simulator, allowing us to restart simulations, swap out environments, and move robots programmatically.
The qcr/benchbot_sim_omni repository captures our learnings in transitioning to the new NVIDIA Isaac Sim, and also works as a standalone package outside the BenchBot ecosystem. The package is a customizable HTTP API for loading environments, placing robots, and controlling simulations. It serves as a great starting point for programmatically running simulations with NVIDIA Isaac Sim.
We welcome pull requests and suggestions for how to expand the capabilities of this package. We also hope it can offer some useful examples for starting your own projects with NVIDIA Isaac Sim, such as the following examples.
Opening environments in NVIDIA Isaac Sim
Opening environments first requires a running simulator instance. A new instance is created by instantiating the SimulationApp class, with the open_usd option letting you pick an environment to open initially:
It’s worth noting that only one simulation instance can run per Python script, and NVIDIA Isaac Sim components must be imported after initializing the instance.
Select a different stage at runtime by using helpers in the NVIDIA Isaac Sim API:
python
from omni.isaac.core.utils.stage import open_stage, update_stage
open_stage(usd_path=MAP_USD_PATH)
update_stage()
Placing a robot in the environment
Before starting a simulation, load and place a robot in the environment. Do this with the Robot class and the following lines of code:
Simulations in NVIDIA Isaac Sim are controlled by the SimulationContext class:
python
from omni.isaac.core import SimulationContext
sim = SimulationContext()
sim.play()
Then, the step method gives fine-grained control over the simulation, which runs at 60Hz. We used this control to manage our sensor publishing, transform trees, and state detection logic.
Another useful code example we stumbled upon was using the dynamic_control module to get the robot’s ground truth pose during a simulation:
python
from omni.isaac.dynamic_control import _dynamic_control
dc = _dynamic_control.acquire_dynamic_control_interface()
robot_dc = dc.get_articulation_root_body(dc.get_object(ROBOT_PRIM_PATH))
gt_pose = dc.get_rigid_body_pose(robot_dc)
Results
Hopefully these code examples are helpful to you in getting started with NVIDIA Isaac Sim. With not much more than these, we’ve had some impressive results:
A remarkable improvement in our photorealistic simulations
Powerful real-time lighting effects
Full customization through basic Python code
Figures 3, 4, and 5 show some of our favorite visual improvements from making the transition to Omniverse.
Figure 3. Surfaces give more realistic reflections in the new NVIDIA Isaac Sim (bottom row) than the previous version (top row)
Figure 4. Shadows and texture rendering feels more realistic in the new NVIDIA Isaac Sim (bottom row) than they previously did (top row)
Figure 5. New NVIDIA Isaac Sim leads to environments that feel more immersive (right), with previous environments (left) feeling “flat” in comparison
Taking it further: BenchBot in other domains
Although semantic scene understanding is a focal point of our research and the origins of its use in research, BenchBot’s applications aren’t limited solely to this domain. BenchBot is built using a rich add-on architecture allowing modular additions and adaptations of the system to different problem domains.
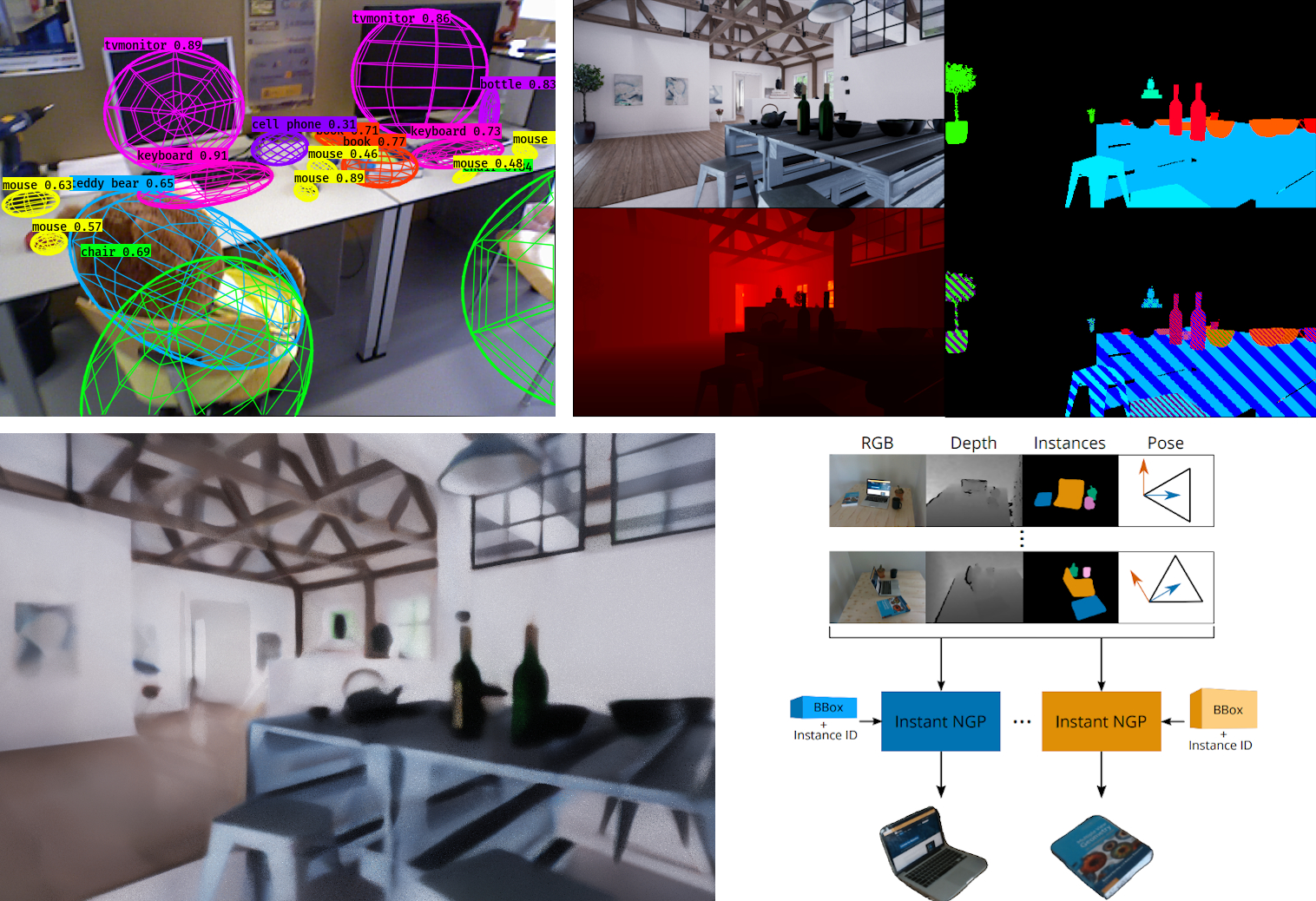
The visual learning and understanding research program at QCR has started using this flexibility to apply BenchBot and its Omniverse-powered simulations to a range of interesting problems. Figure 6 shows a few areas where we’re looking at employing BenchBot:
Figure 6. Future uses for BenchBot, clockwise from top-right: semantic mapping with quadrics, synthetic datasets with object-level segmentation, object-level NeRFs from noisy data, and understanding scenes with NeRFs
We’ve made BenchBot with a heavy focus on being able to fit it to your research problems. As much as we’re enjoying applying it to our research problems, we’re excited to see where others take it. Creating your own add-ons is documented in the add-ons repository, and we’d love to add some third-party add-ons to the official add-ons organization.
Conclusion
We hope this in-depth review has been insightful, and helps you step into robotics to work on the problems that excite us roboticists.
We welcome entries for the RVSU challenge, whether your interest in semantic scene understanding is casual or formal, academic or industrial, competitive or iterative. We think you’ll find competing in the challenge with the BenchBot system an enriching experience. You can register for the challenge, and submit entries through the EvalAI challenge page.
If you’re looking for where to go next with BenchBot and Omniverse, here are some suggestions:
Contact BenchBot’s authors if you’ve got ideas for research collaboration or problems where you’d like to apply it.
At QCR, we’re excited to see where robotics is heading. With tools like BenchBot and the new Omniverse-powered NVIDIA Isaac Sim, there’s never been a better time to jump in and start playing with robotics.
filenames = glob.glob(str(pathlib.Path('/content/maestro-v2.0.0/')/'**/*.mid*')) all_notes = [] for f in filenames[:5]: notes = midi_to_df(f) all_notes.append(notes) notes_df = pd.concat(all_notes) key_order = ['pitch', 'step', 'duration'] train_notes = np.stack([all_notes[key] for key in key_order], axis=1) notes_ds = tf.data.Dataset.from_tensor_slices(train_notes) notes_ds.element_spec
Then get this error:
Traceback (most recent call last) <ipython-input-70-eeb27cd23560> in <module>() 13 notes_df = pd.concat(all_notes) 14 key_order = ['pitch', 'step', 'duration'] ---> 15 train_notes = np.array([all_notes[key] for key in key_order], axis=1) 16 notes_ds = tf.data.Dataset.from_tensor_slices(train_notes) 17 notes_ds.element_spec <ipython-input-70-eeb27cd23560> in <listcomp>(.0) 13 notes_df = pd.concat(all_notes) 14 key_order = ['pitch', 'step', 'duration'] ---> 15 train_notes = np.array([all_notes[key] for key in key_order], axis=1) 16 notes_ds = tf.data.Dataset.from_tensor_slices(train_notes) 17 notes_ds.element_spec TypeError: list indices must be integers or slices, not str
Any help would be appreciated. I’ve spent the last two weeks going through every tutorial I can find and it feels like literally not a single one works without an error every five lines that takes me two hours to research how to fix, some are easy, but all of them lead to something I can’t figure out, and I give up. I am determined to get one of these to work. And this one seems to simple but ofc I’ve reached a point I can’t figure out. PLEASE help me out here. thank you


 The end of 2021 and beginning of 2022 saw the two largest commercial CFD tool vendors, Ansys and Siemens, both launch versions of their flagship CFD tools with support for GPU acceleration.
The end of 2021 and beginning of 2022 saw the two largest commercial CFD tool vendors, Ansys and Siemens, both launch versions of their flagship CFD tools with support for GPU acceleration.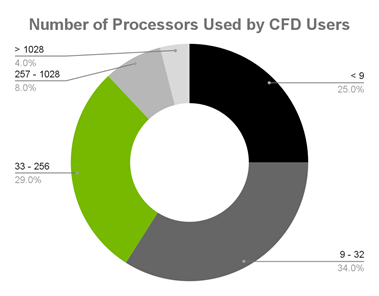
") We built BenchBot to allow roboticists to spend more time researching the exciting and interesting problems in robotics. This post tells BenchBot’s story.
We built BenchBot to allow roboticists to spend more time researching the exciting and interesting problems in robotics. This post tells BenchBot’s story.