GFN Thursday returns with a brand new adventure, exploring the unknown in Phantom Abyss, announced just moments ago by Devolver Digital and Team WIBY. The game launches on PC this summer, and when it does, it’ll be streaming instantly to GeForce NOW members. No GFN Thursday would be complete without new games. And this week Read article >
Learn how to compact the acceleration structure in DXR and what to know before you start implementing.
In ray tracing, more geometries can reside in the GPU memory than with the rasterization approach because rays may hit the geometries out of the view frustum. You can let the GPU compact acceleration structures to save memory usage. For some games, compaction reduces the memory footprint for a bottom-level acceleration structure (BLAS) by at least 50%. BLASes usually take more GPU memory than top-level acceleration structures (TLAS), but this post is also valid for TLAS.
In this post, I discuss how to compact the acceleration structure in DXR and what to know before you start implementing. Do you have your acceleration structure already working but you want to keep the video memory usage as small as possible? Read Managing Memory for Acceleration Structures in DirectX Raytracing first and then come back.
I assume that you already have your acceleration structures suballocated by larger resources and want to save more video memory by compacting them. I use DXR API in this post but it’s similar in Vulkan too.
How does compaction work?
BLAS compaction is not as trivial as adding a new flag to the acceleration structure build input. For your implementation, you can consider this process as a kind of state machine that runs over a few frames (Figure 1). The compaction memory size isn’t known until after the initial build is completed. Wait until the compaction process is completed on the GPU. Here is the brief process to compact BLAS.
Figure 1. Compaction workflow.
Add the compaction flag when building the acceleration structure. For BuildRaytracingAccelerationStructure, you must specify the _ALLOW_COMPACTION build flag for the source BLAS from which to compact.
Read the compaction sizes:
Call EmitRaytracingAccelerationStructurePostbuildInfo with the compaction size buffer, _POSTBUILD_INFO_COMPACTED_SIZE flag and the source BLASes that are built with the _ALLOW_COMPACTION flag. This computes the compaction buffer size on the GPU, which is then used to allocate the compaction buffer. The compaction size buffer is a buffer that holds the size values when it’s ready.
You can pass the post build info structure in your source BuildRaytracingAccelerationStructure instead of calling EmitRaytracingAccelerationStructurePostbuildInfo.
The API doesn’t directly return the size that you want to use, as it’s calculated from the GPU.
Use appropriate synchronization (for example, fence/signal) to make sure that you’re OK to read back the compaction size buffer.
You can use CopyResource and Map to read back the content of the compaction size buffer from GPU to CPU. There could be a couple of frames of delay for reading the size if you execute the command buffer and submit the queue one time per frame.
If the compaction size buffer isn’t ready to be read, then you can keep using the original BLAS for the rest of your rendering pipeline. In the next frames, you keep checking the readiness and continue the following steps.
Create a new target BLAS resource with the known compaction size. Now you know the size and you can make your target BLAS resource ready.
Compact it with Copy:
Copy from the source BLAS to the target BLAS using CopyRayTracingAccelerationStructure with the _COPY_MODE_COMPACT flag. Your target BLAS has the compacted content when it’s finished in GPU.
Make sure that your source BLAS has been built in the GPU already before running CopyRayTracingAccelerationStructure.
Wait for compaction to be finished using fence/signal.
You can also run compactions in parallel with other compactions and with other builds and refits.
(Optional) Build a TLAS that points to the new compacted BLAS.
Use it with DispatchRays. You are now OK to call DispatchRays or use inline ray tracing that uses the compacted BLAS.
Tips
Here are a few tips to help you deal with crashes, corruption, and performance issues.
Compaction count
You don’t need to compact all the BLASes in one frame because you can still call DispatchRays with the source BLASes while they’re being compacted. Limit your per-frame BLAS compaction count based on your frame budget.
Animating BLAS
It’s possible to compact animating BLASes, like for characters or particles. However, you pay the compaction cost and the delay of updates. I don’t recommend using compaction on particles and exploding meshes.
Your compacted BLAS could be outdated when it’s ready. In this case, you can refit on the compacted BLAS, if you can.
Don’t add _ALLOW_COMPACTION flag to BLASes that won’t be compacted because adding this flag isn’t free even though the cost is small.
Crashes or corruptions
If you have crashes or corruptions after your compaction-related changes, then try replacing the _COPY_MODE_COMPACT mode in your CopyRaytracingAccelerationStructure with _COPY_MODE_CLONE instead.
Specify the initial acceleration structure size instead of the compacted size. It’ll make sure that your corrupted data is not from the result of the actual compaction if you still have the same issues. It could be from using the wrong/invalid resources or being out of sync due to missing barriers or fence waiting.
Null UAV barriers
Use null UAV barriers to find why GPU crash issues happen. Keep in mind that using null UAV barriers is suboptimal and try to use more specific options. If you do use null UAV barriers, add them as follows:
Before the Emit..PostbuildInfo call
Before reading back the sizes
After calling CopyRaytracingAccelerationStructure for compaction
A null UAV barrier is just the easiest way to make sure that you got all the resources covered, like if you accidentally use the same scratch resource for multiple BLAS builds. The null barrier should prevent those from clobbering each other. Or if you have a preceding skinning shader, you’ll be sure that the vertex positions are updated.
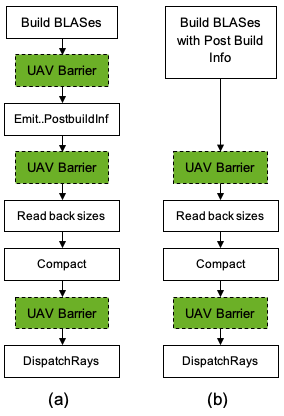
Figure 2 shows two usage patterns that explain where to add barriers. Those barriers are all necessary but you can try replacing them with null barriers to make sure that you didn’t miss anything.
Figure 2. Two barrier usage patterns: (a) is for BLASes built without post build info, (b) is with post build info.
Destroy the source BLAS
Do not destroy the source BLAS while it’s still being used. GPU memory savings can be achieved after you delete the source BLAS. Until then, you are keeping two versions of BLASes in the GPU. Destroy the resource as soon as possible after compacting it. Keep in mind that you can’t destroy them even after CopyAccelerationStructure is completed if you still have previous DispatchRays that uses the source BLAS in GPU.
Max compaction
If you don’t use the PREFER_FAST_BUILD or ALLOW_UPDATE flags, then you should get max compaction.
PREFER_FAST_BUILD uses its own compaction method and results can differ from ALLOW_COMPACTION.
ALLOW_UPDATE must leave room for updated triangles.
Conclusion
It might be more complicated than you thought, but it’s worth doing. I hope you are pleased with the compression rate and the total savings of the GPU memory. I recommend adding debug features that visualize the memory savings and the compression rate from your app to track how it goes per content.
In this post, we showcase our support for open-source robotics frameworks including ROS and ROS 2 on NVIDIA Jetson developer kits.
NVIDIA Jetson developer kits serve as a go-to platform for roboticists because of its ease of use, system support, and its comprehensive support for accelerating AI workloads. In this post, we showcase our support for open-source robotics frameworks including ROS and ROS 2 on NVIDIA Jetson developer kits.
Figure 1. ROS and ROS 2 with AI acceleration on NVIDIA Jetson platform.
This post includes the following helpful resources:
We offer different Docker images for ROS and ROS 2 with machine learning libraries. We also provide Dockerfiles for you to build your own Docker images according to your custom requirements.
ROS and ROS 2 Docker images
We provide support for ROS 2 Foxy Fitzroy, ROS 2 Eloquent Elusor, and ROS Noetic with AI frameworks such as PyTorch, NVIDIA TensorRT, and the DeepStream SDK. We include machine learning (ML) libraries including scikit-learn, numpy, and pillow. The containers are packaged with ROS 2 AI packages accelerated with TensorRT.
ROS 2 Foxy, ROS 2 Eloquent, and ROS Noetic with PyTorch and TensorRT Docker image:
To enable you to easily run different versions of ROS 2 on Jetson, we released various Dockerfiles and build scripts for ROS 2 Eloquent, ROS 2 Foxy, ROS Melodic, and ROS Noetic. These containers provide an automated and reliable way to install ROS and ROS 2 on Jetson and build your own ROS-based applications.
Because Eloquent and Melodic already provide prebuilt packages for Ubuntu 18.04, the Dockerfiles, install these versions of ROS into the containers. In contrast, Foxy and Noetic are built from the source inside the container, as those versions only come prebuilt for Ubuntu 20.04. With the containers, using these versions of ROS and ROS 2 is the same, regardless of the underlying OS distribution.
To build the containers, clone the repo on your Jetson device running NVIDIA JetPack 4.4 or newer, and run the ROS build script:
$ git clone https://github.com/dusty-nv/jetson-containers
$ cd jetson-containers
$ ./scripts/docker_build_ros.sh all # build all: melodic, noetic, eloquent, foxy
$ ./scripts/docker_build_ros.sh melodic # build only melodic
$ ./scripts/docker_build_ros.sh noetic # build only noetic
$ ./scripts/docker_build_ros.sh eloquent # build only eloquent
$ ./scripts/docker_build_ros.sh foxy # build only foxy
We’ve put together bundled packages with all the materials needed to run various GPU-accelerated AI applications with ROS and ROS 2 packages. There are applications for object detection, human pose estimation, gesture classification, semantics segmentation, and NVApril Tags.
The repository provides four different packages for classification and object detection using PyTorch and TensorRT. This repository serves as a starting point for AI integration with ROS 2. The main features of the packages are as follows:
For classification, select from various ImageNet pretrained models, including Resnet18, AlexNet, SqueezeNet, and Resnet50.
For detection, MobileNetV1-based SSD is currently supported, trained on the COCO dataset.
The TensorRT packages provide a significant speedup in carrying out inference relative to the PyTorch models performing inference directly on the GPU.
The inference results are published in the form of vision_msgs.
On running the node, a window is also shown with the inference results visualized.
A Jetson-based Docker image and launch file is provided for ease of use.
This repo contains deep learning inference nodes and camera/video streaming nodes for ROS and ROS 2 with support for Jetson Nano, TX1, TX2, Xavier NX, NVIDIA AGX Xavier, and TensorRT.
The nodes use the image recognition, object detection, and semantic segmentation DNNs from the jetson-inference library and NVIDIA Hello AI World tutorial. Both come with several built-in pretrained networks for classification, detection, and segmentation and the ability to load customized user-trained models.
The camera/video streaming nodes support the following I/O interfaces:
MIPI CSI cameras
V4L2 cameras
RTP / RTSP
Videos and images
Image sequences
OpenGL windows
ROS Melodic and ROS 2 Eloquent are supported. We recommend the latest version of NVIDIA JetPack.
In this repository, we accelerate human-pose estimation using TensorRT. We use the widely adopted NVIDIA-AI-IOT/trt_pose repository. To understand human pose, pretrained models infer 17 body parts based on the categories from the COCO dataset. Here are the key features of the ros2_trt_pose package:
Publishes pose_msgs, such as count of person and person_id. For each person_id, it publishes 17 body parts.
Provides a launch file for easy usage and visualizations on Rviz2:
Image messages
Visual markers: body_joints, body_skeleton
Contains a Jetson-based Docker image for easy install and usage.
This ROS 2 node uses the NVIDIA GPU-accelerated AprilTags library to detect AprilTags in images and publish the poses, IDs, and additional metadata. This has been tested on ROS 2 (Foxy) and should run on x86_64 and aarch64 (Jetson hardware). It is modeled after and comparable to the ROS 2 node for CPU AprilTags detection.
For more information about the NVIDIA Isaac GEM on which this node is based, see April Tags in the NVIDIA Isaac SDK 2020.2 documentation. For more information, see AprilTags Visual Fiducial System.
ROS 2 package for hand pose estimation and gesture classification
The ROS 2 package takes advantage of the recently released NVIDIA-AI-IOT/trt_pose_hand repo: Real-time hand pose estimation and gesture classification using TensorRT. It provides following key features:
Hand pose message with 21 key points
Hand pose detection image message
std_msgs for gesture classification with six classes:
fist
pan
stop
fine
peace
no hand
Visualization markers
Launch file for RViz2
ROS 2 package for text detection and monocular depth estimation
The jetson-stats package is for monitoring and controlling your NVIDIA Jetson [Xavier NX, Nano, NVIDIA AGX Xavier, TX1, or TX2]. In this repository, we provide a ROS 2 package for jetson_stats such that you can monitor different system status in deployment. The ROS package developed by Jetson Champion Raffaello Bonghi, PhD can be found at rbonghi/ros_jetson_stats.
The ros2_jetson_stats package features the following ROS 2 diagnostic messages:
GPU/CPU usage percentage
EMC/SWAP/Memory status (% usage)
Power and temperature of SoC
You can now control the following through the ROS 2 command line:
Fan (mode and speed)
Power model (nvpmodel)
Jetson_clocks
ROS 2 packages for the DeepStream SDK
The DeepStream SDK delivers a complete streaming analytics toolkit to build full AI-based solutions using multisensor processing, video, and image understanding. It offers supportfor popular object detection and segmentation models such as state-of-the-art SSD, YOLO, FasterRCNN, and MaskRCNN.
In this repository, we provide ROS 2 nodes based on the NVIDIA-AI-IOT/deepstream_python_apps repo to perform two inference object detection and attribute classification tasks:
Object detection: Four classes of objects are detected: Vehicle, Person, RoadSign, and TwoWheeler.
Attribute classification: Three types of attributes are classified for objects of class Vehicle: Color, Make, and Type.
We also provide sample ROS 2 subscriber nodes that subscribe to these topics and display results in the vision_msgs format. Each inference task also spawns a visualization window with bounding boxes and labels around detected objects.
This promising work looks at the potential to use the power of robotics and deep learning together. We use FCN-AlexNet, a segmentation network, to perform several real-world applications such as detecting stairs, potholes, or other hazards to robots in unstructured environments.
Many Jetson users choose lidars as their major sensors for localization and perception in autonomous solutions. CUDA-PCL 1.0 includes three CUDA-accelerated PCL libraries:
Here are sample projects to leverage the NVIDIA Jetson platform for both the open-source developer community, such as building an autonomous model-scale car, and enterprises, such as implementing human pose estimation for robot arm solutions. All are enabled by ROS, ROS 2 and NVIDIA Jetson.
ROS 2-based NanoSaur
NanoSaur is an open-source project designed and made by Raffaello Bonghi. It’s a fully 3D printable robot, made to work on your desk, and uses a simple camera with two OLED-like eyes. The size is 10x12x6cm in only 500g. With a simple power-bank, it can wander your desktop autonomously. It’s a little robot for robotics and AI education.
ROS and ROS 2 integration with Comau North America
This package demonstrates using a ROS 2 package to control the e.DO by bridging messages to ROS1, where the e.DO core package resides.
Video 1. Using NVIDIA Jetson and GPU accelerated gesture classification AI package with the Comau e.DO robot arm.
To test the Human Hand Pose Estimation package, the team used a Gazebo simulation of the Comau e.DO from Stefan Profanter’s open source repository. This enabled control of the e.DO in simulation with the help of MoveIt Motion Planning software. A ROS 2 node in the hand pose package publishes the hand pose classification message.
Because MoveIt 1.0 works only with ROS1, a software bridge was used to subscribe to the message from ROS1. Based on the hand pose detected and classified, a message with robot pose data is published to a listener, which sends the movement command to MoveIt. The resulting change in the e.DO robot pose can be seen in Gazebo.
ROS-based Yahboom DOFBOT
DOFBOT is the best partner for AI beginners, programming enthusiasts, and Jetson Nano fans. It is designed based on Jetson Nano and contains six HQ servos, an HD camera, and a multifunction expansion board. The whole body is made of green oxidized aluminum alloy, which is beautiful and durable. Through the ROS robot system, we simplify the motion control of serial bus servo.
With over 1600 sessions on the latest in AI, data center, accelerated computing, healthcare, intelligent networking, game development, and more – there is something for everyone.
With over 1600 sessions on the latest in AI, data center, accelerated computing, healthcare, intelligent networking, game development, and more – there is something for everyone
Lets say for object detection of a video feed, would there be any value in using Google Coral Edge USB TPUs or processing Tensorflow on a Jetson device if the alterantive is something like an Intel NUC 10 i7 ( Core i7-10710U Passmark score: 10.1k) with NVME storage?
SIGGRAPH 2021 is the premier conference and exhibition in computer graphics and interactive techniques. This year, participants can join a series of exciting pre-conference webinars called SIGGRAPH Frontiers Interactions.
Add SIGGRAPH Frontiers to Your Calendar – Courses Begin May 24th
SIGGRAPH 2021 is the premier conference and exhibition in computer graphics and interactive techniques. This year, participants can join a series of exciting pre-conference webinars called SIGGRAPH Frontiers Interactions. Starting on May 24, you can take part in industry-leading discussions around ray tracing, machine learning and neural networks.
These pre-conference webinars are ongoing educational events that will take place through June 18, and feature several NVIDIA guest speakers. Both courses are free. Simply add the events to your calendar of choice here and show up to experience the research deep dive and industry-leading discourse.
Introduction to Ray Tracing Course
The first of seven ray tracing webinars starts on May 25, and features Peter Shirley, author of the popular book, Ray Tracing in One Weekend. This is a great introductory level course to gain a strong understanding of the basic principles of ray tracing. Other interactive lectures feature experts from Disney Animation and NVIDIA.
Machine Learning and Neural Networks Course
The first of seven machine learning and neural network webinars starts on May 24. Several ML and NN experts from Google, Disney, Apple and NVIDIA will be featured. These are intermediate level courses intended to gain a strong understanding of the basic principles of ML and NN, and how it can be applied to your engineering solutions.
Make sure to stay up-to-date with all things SIGGRAPH and register for the virtual event, taking place August 9-13.
For a particle physicist, the world’s biggest questions — how did the universe originate and what’s beyond it — can only be answered with help from the world’s smallest building blocks. James Kahn, a consultant with German research platform Helmholtz AI and a collaborator on the global Belle II particle physics experiment, uses AI and Read article >
Researchers from the Netherlands’ University of Groningen have used AI to reveal that the Great Isaiah Scroll — the only entirely preserved volume from the original Dead Sea Scrolls — was likely copied by two scribes who wrote in a similar style.
Researchers from the Netherlands’ University of Groningen have used AI to reveal that the Great Isaiah Scroll — the only entirely preserved volume from the original Dead Sea Scrolls — was likely copied by two scribes who wrote in a similar style.
While most scholars long believed the Isaiah Scroll’s 17 sheets of parchment were copied by a single scribe around the second century BCE, others suggested that it was the work of two scribes who each wrote half the text.
These theorists “would try to find a ‘smoking gun’ in the handwriting, for example, a very specific trait in a letter that would identify a scribe,” said Mladen Popović, director of the University of Groningen’s Qumran Institute, which is dedicated to the study of the Dead Sea Scrolls.
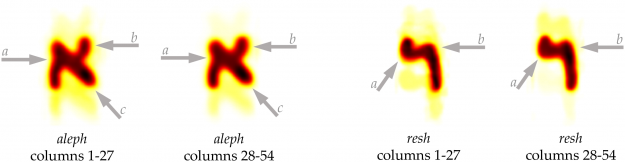
But even a single scribe’s writing could have some natural variation across the text, caused by fatigue, injury, or even a change in writing implements. And analyzing these variations by traditional paleographic methods is impractical for a text as lengthy as the Isaiah Scroll, which contains more than 5,000 occurrences of just the letter aleph, or “a.”
Popović and his collaborators thought AI could help process the rich data from a digital copy of the text. In a recent PLOS One article, the team details how they used pattern recognition and AI techniques to pinpoint an area halfway through the scroll where there is an apparent transition from one scribe’s handwriting to another’s.
The analysis identified subtle differences in the positioning, thickness, and length of certain strokes in the first and second halves of the scroll.
After using an artificial neural network to separate the inked letters from the parchment on images of the Isaiah Scroll, the team used a Kohonen network, a type of unsupervised learning model, to collect multiple examples of the same characters in the text.
Precisely capturing the original writing “is important because the ancient ink traces relate directly to a person’s muscle movement and are person-specific,” said Lambert Schomaker, paper co-author and professor at the University of Groningen.
The group ran the neural networks using CUDA and NVIDIA GPUs in the university’s Peregrine HPC cluster, which includes over 200,000 CUDA cores.
To help check their results, the researchers added extra noise to the data, and found the AI analysis still came to the same conclusion. They also created heat maps that averaged how individual characters appeared in the first and second halves of the scroll, helping scholars visualize the difference between the sections.
The researchers plan to apply this methodology to additional parchments that make up the Dead Sea Scrolls.
“We are now able to identify different scribes,” said Popović.”We will never know their names. But after seventy years of study, this feels as if we can finally shake hands with them through their handwriting.”
Legendary car manufacturer Aston Martin is using the latest virtual and mixed reality technologies to drive new experiences for customers and designers. The company has worked with Lenovo to use VR and AR to deliver a unique experience that allowed customers to explore its first luxury SUV, the Aston Martin DBX, without physically being in Read article >

 Learn how to compact the acceleration structure in DXR and what to know before you start implementing.
Learn how to compact the acceleration structure in DXR and what to know before you start implementing.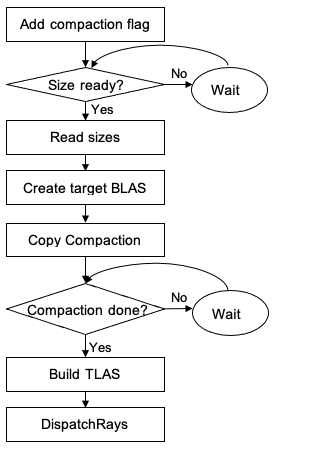
 In this post, we showcase our support for open-source robotics frameworks including ROS and ROS 2 on NVIDIA Jetson developer kits.
In this post, we showcase our support for open-source robotics frameworks including ROS and ROS 2 on NVIDIA Jetson developer kits.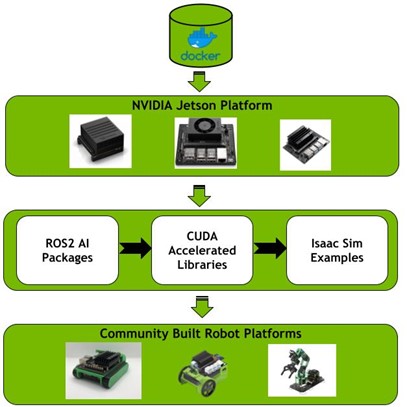



 With over 1600 sessions on the latest in AI, data center, accelerated computing, healthcare, intelligent networking, game development, and more – there is something for everyone.
With over 1600 sessions on the latest in AI, data center, accelerated computing, healthcare, intelligent networking, game development, and more – there is something for everyone.

 SIGGRAPH 2021 is the premier conference and exhibition in computer graphics and interactive techniques. This year, participants can join a series of exciting pre-conference webinars called SIGGRAPH Frontiers Interactions.
SIGGRAPH 2021 is the premier conference and exhibition in computer graphics and interactive techniques. This year, participants can join a series of exciting pre-conference webinars called SIGGRAPH Frontiers Interactions. 

 Researchers from the Netherlands’ University of Groningen have used AI to reveal that the Great Isaiah Scroll — the only entirely preserved volume from the original Dead Sea Scrolls — was likely copied by two scribes who wrote in a similar style.
Researchers from the Netherlands’ University of Groningen have used AI to reveal that the Great Isaiah Scroll — the only entirely preserved volume from the original Dead Sea Scrolls — was likely copied by two scribes who wrote in a similar style.