It’s never been easier to be a PC gamer. GeForce NOW is your gateway into PC gaming. With the power of NVIDIA GeForce GPUs in the cloud, any gamer can stream titles from the top digital games stores — even on low-powered hardware. Evolve to the PC gaming ranks this GFN Thursday and get ready Read article >
I have been working on two codes, one in TF1, the other one in TF2. I did some research about the TensorFlow architecture the difference between these two, maybe you could check if my understanding is correct?
In version 1, graphs need to be created manually by the user. In version 2, the API has been made more user-friendly and the graph creation is now automated in Keras. Has Keras been created explicitly for TensorFlow 2, or does it exist independently from it?
The eager execution mode basically breaks the graph approach to create a more “classical” computation scheme. It is used per default in pure high-level TensorFlow, since here the computations have a smaller impact on performance. On the other hand, in Keras, eager mode is switched off and behaves more or less like TF1. Is this correct?
I have extracted audio embeddings from Google Audioset corpus.
Now, I want to use these audio embeddings for training my own model (CNN). I have some confusion about these audio embeddings.
Should I extract STFT and MFCC from the audio embeddings? If so, how can I do that (any way to use librosa?)? Or, are the audio embeddings already transformed to MFCC?
What should be the best way to split the audio set corpus into train, test and validate datasets? They are if Tfrecord format and each tfrecord file contain various segment of audio clips having different class labels.
If I want to work on selective class labels (such as rowing, or car sound), what should be the best way to extract the selective audio segments?
Also, please share some helpful resources about working with Google audioset corpus if possible.
I am trying to build a program that will classify objects, and I want my clients to be able to add extra objects freely. However, from my knowledge, this requires the retraining of the entire neural network, and this is very expensive.
Is there a network where we would be able to add more options to the image classifier without retraining or little training?
Partnering with NVIDIA and the ICC, Photon Commerce is creating the world’s most intelligent financial AI platform for instant B2B payments, invoices, statements, and receipts.
The business-to-business (B2B) payments ecosystem is massive, with $25 trillion in payments flowing between businesses each year. Photon Commerce, a financial AI platform company, empowers fintech leaders to process B2B payments, invoices, statements, and receipts instantly.
Over two-thirds of B2B transactions are processed through automated clearing house payments (a type of electronic payment) and checks. Yet, these transactions can take up to 3 days to clear. This has created a need for real-time payments that are processed instantaneously and safely, eliminating the risk of delinquent payments.
Partnering with NVIDIA and the International Chamber of Commerce, Photon Commerce guides payment processors, neobanks, and credit card fintechs on how to train and invent the world’s most intelligent AI for payments, invoices, and commerce.
Why is the use of AI crucial in payment processing? Card-not-present payments, such as those made online or over the phone, are costly for merchants, requiring manual entry and approval. AI-powered payments also work remotely but are instantaneous and secure.
Additionally, two out of three merchants today do not accept credit cards due to fees. Not even Amazon is willing to pay these expenses at times. The solution lies in real-time payments and request-for-payment offerings. These low-cost payment systems provide fraud-free payment options for 30 million merchants in the US.
Figure 1: Faster payment processing has led to the increased adoption of AI in the B2B sector.
One-click checkout for B2B transactions
Photon’s AI offers one-click bill pay for customers’ credit card lenders and leading core payment processors. These entities handle trillions of dollars in payments for the majority of banks and merchants.
One such customer, Settle is a leader in receivables finance, payables finance, and bill pay for eCommerce merchants like Italic, Huron, Brightland, and Branch.
Pioneering a Buy-Now-Pay-Later solution for B2B and eCommerce merchants, Settle Founder and CEO, Alek Koenig claims Photon’s invoice automation technology is a ‘godsend.’
“Photon’s solution enabled us to improve user experience, capture greater revenues, and significantly reduce manual keying of invoice and payment data. Before Photon, we were just typing up each invoice manually,” said Koenig.
Settle’s AI-based financial services and solutions achieved meteoric growth, especially among small to midsized businesses. The company raised nearly $100M from top-tier investors, such as Kleiner Perkins, within only 2 years of its inception.
55x the performance over CPUs
AI accelerated processing forms the underpinning of Photon Commerce’s AI solution capable of tackling unstructured or semistructured data and serving their customers. Photon’s base models for enterprise workloads start with 16 NVIDIA V100 GPUs. Depending on throughput, bandwidth, and power factors, Photon’s deep learning machines readily scale to 64 NVIDIA V100 GPUs or more.
GPU-accelerated computing has been critical to Photon’s machine learning models, both for training and inference. Photon’s deep learning was trained on NVIDIA V100s, providing 55x faster performance than CPU servers and 24x faster performance during inference.
Custom development and production boxes or clusters are provisioned either in the cloud, hybrid cloud, or on-prem deployments. Docker containers use Kubernetes to provide container orchestration across clusters during the scaling of models. Photon’s API architecture runs through a data pipeline of file validation, document classification, computer vision, then NLP. Photon’s NLP transformer models are autoregressive in architecture, employing model and data parallelism.
Next generation payment systems using AI
AI payment solution concepts are key to enabling end-to-end traceability, visibility, and scaling to high-transaction volumes needed for eCommerce merchants, and logistics companies for trade finance solutions.
Below are three examples of Photon’s AI solutions improving payment systems.
Receipts and invoices are made easier with Computer Vision/NLP
The value of extracting information from documents, particularly in the context of finance, for unstructured and semistructured data is enormous. Companies and individuals can process invoices, receipts, and forms with little to no-human interaction, saving time and money. Photon Commerce’s AI technology solves this problem by automatically reading, understanding, approving, and paying any invoice using computer vision and NLP.
Creating global standards for payment, invoice, and trade finance documentation using AI
Business documents are messy and each company has different Enterprise resource planning systems, record portals, and formats. These systems often break down with disputes, errors, and fraud happening daily. Photon Commerce’s solutions standardize any invoice, bill, or payment document in the world, regardless of language or format. This facilitates instant approvals, payments, and straight-through-processing.
Worldwide trade partners can now speak the same language and collaborate
Businesses and trade partners can now speak the same language. Photon’s NLP understands that a “vendor”, “supplier”, “seller”, “beneficiary”, “merchant”, and “卖方” are generally synonyms, referring to the same “object” called as Named Entity Recognition. Photon’s reconciliation AI can instantly flip any purchase order into an invoice, or match purchase orders, invoices, receipts, remittances, shipping labels, bills-of-lading, proof-of-deliveries, and rate confirmations seamlessly together.
See AI in action
Reach out to nvidia@photoncommerce.com and learn more about how AI accelerates payments, invoicing, and trade collaboration between businesses.
I’m tuning the hyperparameters of a Tensorflow model in Google AI platform, but I have the following problem: For the evaluation metric I want to optimize, it seems like only the metric value at the end of the training is reported to the hyperparameter optimizer, instead of the best value achieved during training. Is it possible to create a metric, which will track the maximum value over the entire training?
Despite these successes, it is still more effective to use classical algorithms for studying quantum chemistry than the noisy quantum processors we have available today. However, when the laws of quantum mechanics are translated into programs that a classical computer can run, we often find that the amount of time or memory required scales very poorly with the size of the physical system to simulate.
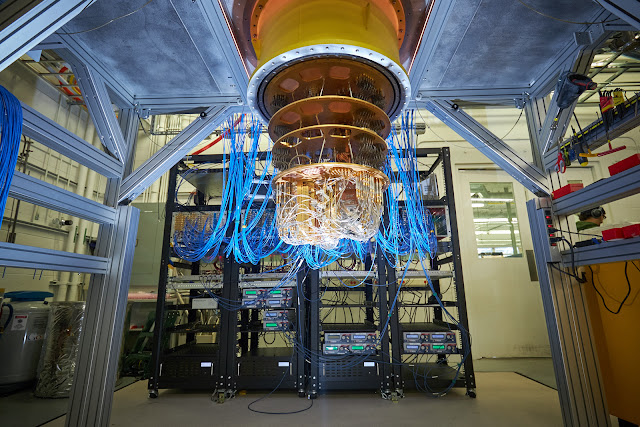
Today, in collaboration with Dr. Joonho Lee and Professor David Reichmann at Colombia, we present the Nature publication “Unbiasing Fermionic Quantum Monte Carlo with a Quantum Computer”, where we propose and experimentally validate a new way of combining classical and quantum computation to study chemistry, which can replace a computationally-expensive subroutine in a powerful classical algorithm with a “cheaper”, noisy, calculation on a small quantum computer. To evaluate the performance of this hybrid quantum-classical approach, we applied this idea to perform the largest quantum computation of chemistry to date, using 16 qubits to study the forces experienced by two carbon atoms in a diamond crystal. Not only was this experiment four qubits larger than our earlier chemistry calculations on Sycamore, we were also able to use a more comprehensive description of the physics that fully incorporated the interactions between electrons.
A New Way of Combining Quantum and Classical Our starting point was to use a family of Monte Carlo techniques (projector Monte Carlo, more on that below) to give us a useful description of the lowest energy state of a quantum mechanical system (like the two carbon atoms in a crystal mentioned above). However, even just storing a good description of a quantum state (the “wavefunction”) on a classical computer can be prohibitively expensive, let alone calculating one.
Projector Monte Carlo methods provide a way around this difficulty. Instead of writing down a full description of the state, we design a set of rules for generating a large number of oversimplified descriptions of the state (for example, lists of where each electron might be in space) whose average is a good approximation to the real ground state. The “projector” in projector Monte Carlo refers to how we design these rules — by continuously trying to filter out the incorrect answers using a mathematical process called projection, similar to how a silhouette is a projection of a three-dimensional object onto a two-dimensional surface.
Unfortunately, when it comes to chemistry or materials science, this idea isn’t enough to find the ground state on its own. Electrons belong to a class of particles known as fermions, which have a surprising quantum mechanical quirk to their behavior. When two identical fermions swap places, the quantum mechanical wavefunction (the mathematical description that tells us everything there is to know about them) picks up a minus sign. This minus sign gives rise to the famous Pauli exclusion principle (the fact that two fermions cannot occupy the same state). It can also cause projector Monte Carlo calculations to become inefficient or even break down completely. The usual resolution to this fermionsign problem involves tweaking the Monte Carlo algorithm to include some information from an approximation to the ground state. By using an approximation (even a crude one) to the lowest energy state as a guide, it is usually possible to avoid breakdowns and even obtain accurate estimates of the properties of the true ground state.
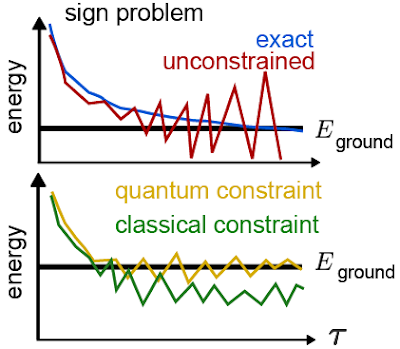
Top: An illustration of how the fermion sign problem appears in some cases. Instead of following the blue line curve, our estimates of the energy follow the red curve and become unstable. Bottom: An example of the improvements we might see when we try to fix the sign problem. By using a quantum computer, we hope to improve the initial guess that guides our calculation and obtain a more accurate answer.
For the most challenging problems (such as modeling the breaking of chemical bonds), the computational cost of using an accurate enough initial guess on a classical computer can be too steep to afford, which led our collaborator Dr. Joonho Lee to ask if a quantum computer could help. We had already demonstrated in previous experiments that we can use our quantum computer to approximate the ground state of a quantum system. In these earlier experiments we aimed to measure quantities (such as the energy of the state) that are directly linked to physical properties (like the rate of a chemical reaction). In this new hybrid algorithm, we instead needed to make a very different kind of measurement: quantifying how far the states generated by the Monte Carlo algorithm on our classical computer are from those prepared on the quantum computer. Using some recently developed techniques, we were even able to do all of the measurements on the quantum computer before we ran the Monte Carlo algorithm, separating the quantum computer’s job from the classical computer’s.
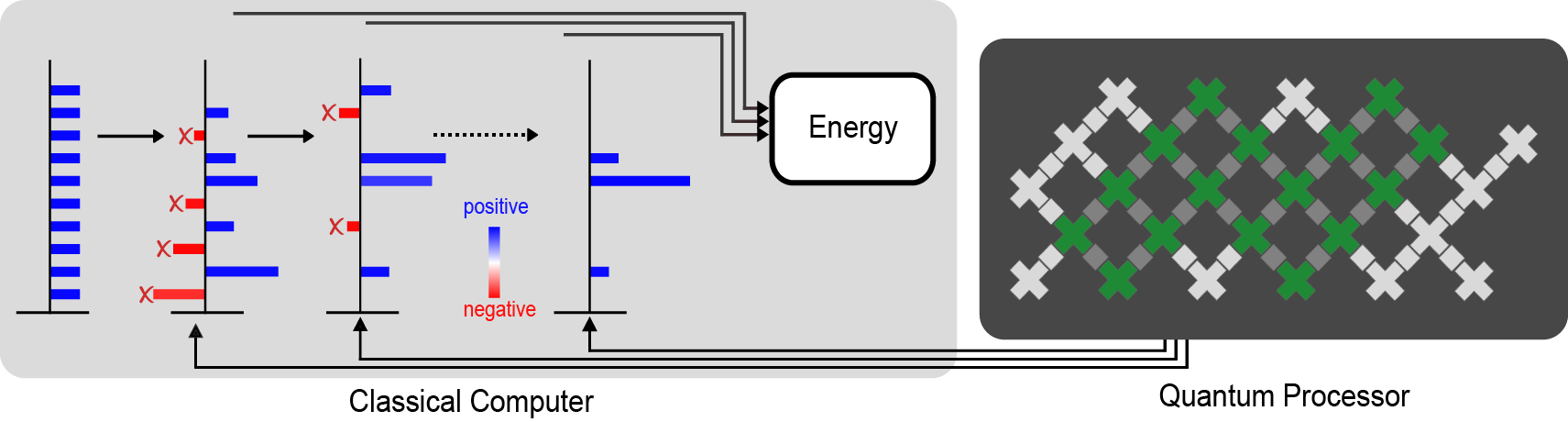
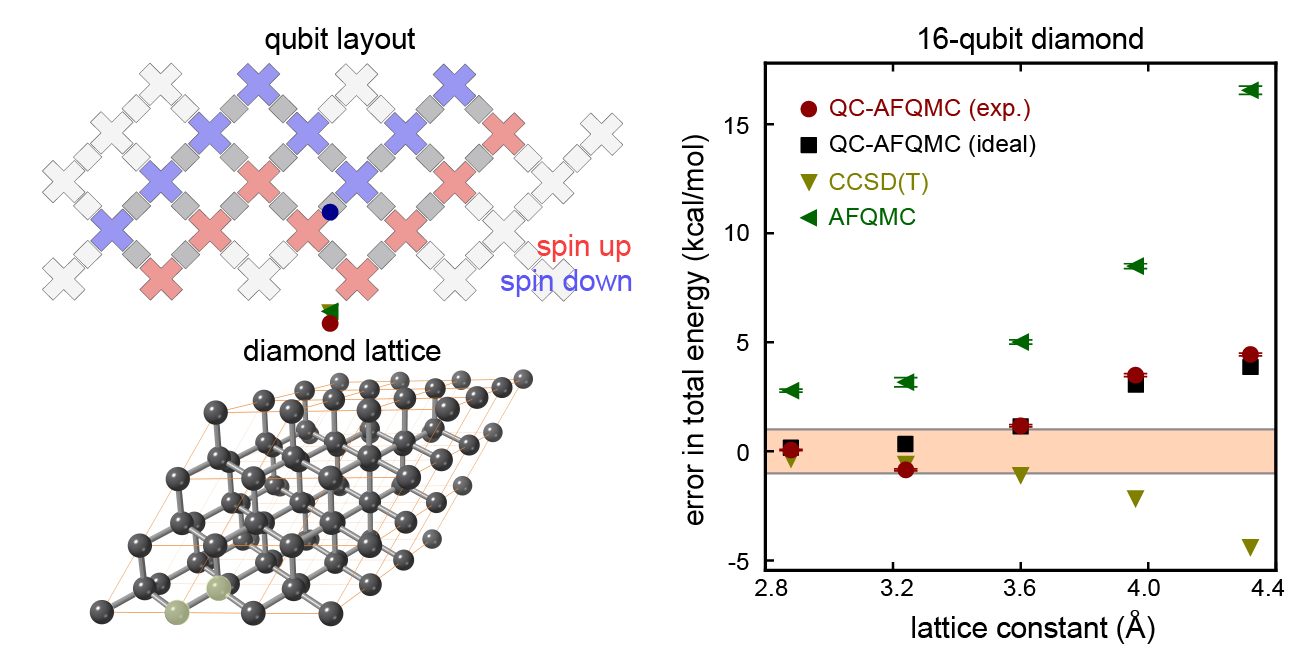
A diagram of our calculation. The quantum processor (right) measures information that guides the classical calculation (left). The crosses indicate the qubits, with the ones used for the largest experiment shaded green. The direction of the arrows indicate that the quantum processor doesn’t need any feedback from the classical calculation. The red bars represent the parts of the classical calculation that are filtered out by the data from the quantum computer in order to avoid the fermion sign problem and get a good estimate of properties like the energy of the ground state.
This division of labor between the classical and the quantum computer helped us make good use of both resources. Using our Sycamore quantum processor, we prepared a kind of approximation to the ground state that would be difficult to scale up classically. With a few hours of time on the quantum device, we extracted all of the data we needed to run the Monte Carlo algorithm on the classical computer. Even though the data was noisy (like all present-day quantum computations), it had enough signal that it was able to guide the classical computer towards a very accurate reconstruction of the true ground state (shown in the figure below). In fact, we showed that even when we used a low-resolution approximation to the ground state on the quantum computer (just a few qubits encoding the position of the electrons), the classical computer could efficiently solve a much higher resolution version (with more realism about where the electrons can be).
Top left: a diagram showing the sixteen qubits we used for our largest experiment. Bottom left: an illustration of the carbon atoms in a diamond crystal. Our calculation focused on two atoms (the two that are highlighted in translucent yellow). Right: A plot showing how the error in the total energy (closer to zero is better) changes as we adjust the lattice constant (the spacing between the two carbon atoms). Many properties we might care about, such as the structure of the crystal, can be determined by understanding how the energy varies as we move the atoms around. The calculations we performed using the quantum computer (red points) are comparable in accuracy to two state-of-the-art classical methods (yellow and green triangles) and are extremely close to the numbers we would have gotten if we had a perfect quantum computer rather than a noisy one (black points). The fact that these red and black points are so close tells us that the error in our calculation comes from using an approximate ground state on the quantum computer that was too simple, not from being overwhelmed by noise on the device.
Using our new hybrid quantum algorithm, we performed the largest ever quantum computation of chemistry or materials science. We used sixteen qubits to calculate the energy of two carbon atoms in a diamond crystal. This experiment was four qubits larger than our first chemistry calculations on Sycamore, we obtained more accurate results, and we were able to use a better model of the underlying physics. By guiding a powerful classical Monte Carlo calculation using data from our quantum computer, we performed these calculations in a way that was naturally robust to noise.
We’re optimistic about the promise of this new research direction and excited to tackle the challenge of scaling these kinds of calculations up towards the boundary of what we can do with classical computing, and even to the hard-to-study corners of the universe. We know the road ahead of us is long, but we’re excited to have another tool in our growing toolbox.
Acknowledgements I’d like to thank my co-authors on the manuscript, Bryan O’Gorman, Nicholas Rubin, David Reichman, Ryan Babbush, and especially Joonho Lee for their many contributions, as well as Charles Neill and Pedram Rousham for their help executing the experiment. I’d also like to thank the larger Google Quantum AI team, who designed, built, programmed, and calibrated the Sycamore processor.
I wanted to do a group project on tensorflow object detection for university, but, our teacher wanted us to use our own images instead of datasets. The project is a road safety app that can detect and label road signs, oncoming vehicles and pedestrians. Is this going to be too much to handle , is it possible to make a app that can detect these things using custom images or is it impossible?
(Side note : i can also reduce the project to just detection and recognition of road signs and vehicles)

 Partnering with NVIDIA and the ICC, Photon Commerce is creating the world’s most intelligent financial AI platform for instant B2B payments, invoices, statements, and receipts.
Partnering with NVIDIA and the ICC, Photon Commerce is creating the world’s most intelligent financial AI platform for instant B2B payments, invoices, statements, and receipts.