This month’s NVIDIA GTC provides the best opportunity yet to learn how leading companies and their designers, planners and operators are using the industrial metaverse to create physically accurate, perfectly synchronized, AI-enabled digital twins. The global conference, which runs online Sept. 19-22, will focus in part on how NVIDIA Omniverse Enterprise enables companies to design Read article >
We’d wake you up when September ends, but then you’d miss out on a whole new set of games coming to GeForce NOW. Gear up for 22 games joining the GeForce NOW library, with 19 day-and-date releases including action role-playing game Steelrising. Playing them all will take some serious strategy. And build the perfect Minifigure Read article >
Recommendation systems are widely used today to personalize user experiences and improve customer engagement in various settings like e-commerce, social media,…
Recommendation systems are widely used today to personalize user experiences and improve customer engagement in various settings like e-commerce, social media, and news feeds. Serving user requests with low latency and high accuracy is hence critical to sustain user engagement.
This includes performing high-speed lookups and computations while seamlessly refreshing models with the newest updates, which is especially challenging for large-scale recommenders where the model size exceeds GPU memory.
NVIDIA Merlin HugeCTR, an open-source framework designed to optimize large-scale recommenders on NVIDIA GPUs, recently released Hierarchical Parameter Server (HPS) architecture to specifically address the needs of industry-grade inference systems. Experiments indicate that this approach enables scalable deployment with low latency on popular benchmarking datasets.
Challenges with large-scale recommendation inference
Large embedding tables: The inputs to typical deep recommendation models can be numerical (user age or item price, for example) or categorical features (user ID or item ID, for example). Unlike numerical features, categorical features need to be transformed into numerical vectors to be fed into multilayer perceptron (MLP) layers for dense computation. This is facilitated by an embedding table that learns a mapping (“embeddings”) from the categorical to the numerical feature space.
Embedding tables are therefore part of the model parameters and can be memory-intensive, reaching up to TB-scale for modern recommender systems. This is well beyond the onboard memory capacity of modern GPUs. Consequently, most existing solutions fall back to hosting embedding tables in CPU memory, which does not take advantage of high-bandwidth GPU memory leading to higher end-to-end latencies.
Scalability: Driven by user behavior, many customer applications are built to serve peak usages, and need the flexibility to scale-out or scale-up the AI inference engine based on their expected and actual load.
Framework and platform agnostic: The AI inference engine must be able to serve both deep-learning models (DeepFM, DCN, DLRM, MMOE, DIN, and DIEN, for example) trained by frameworks like TensorFlow or PyTorch, as well as simple machine learning (ML) models. In addition, customers desire hybrid deployment of both multiple different model architectures and multiple instances of a single model. Models must also be deployed across a variety of hardware platforms from cloud to edge.
Deploying new models and online training updates: Customers want the option to frequently update their models according to market trends and new user data. Model updates should be seamlessly applied to inference deployments.
Fault tolerance and high availability: Customers need to maintain the same level of SLA, preferably five-nines or above for mission-critical applications.
The following section provides more details about how NVIDIA Merlin HugeCTR addresses these challenges using HPS to enable large-scale inference for recommendations.
Hierarchical Parameter Server overview
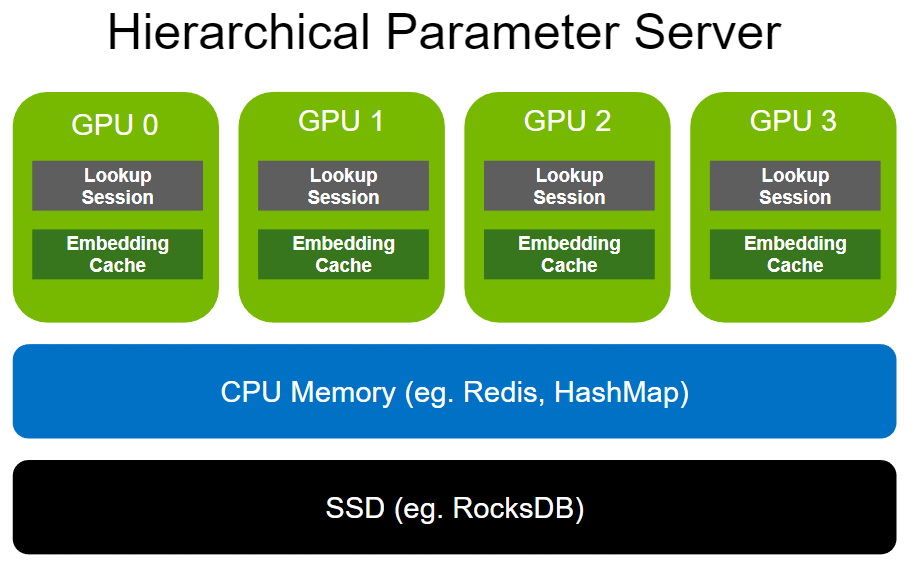
The Hierarchical Parameter Server enables deployment of large recommendation inference workloads using a multi-level adaptive storage solution. To store large-scale embeddings, it uses GPU memory as the first-level cache, CPU memory as second-level cache (such as HashMap for local deployment and Redis for distributed), and SSD for extended storage capacity (such as RocksDB).
Both CPU memory and SSD can be flexibly configured based on the user’s needs. Note that the size of dense layers (MLPs) is much smaller in comparison to embeddings. Therefore, dense layers are replicated across the various GPU workers in a data-parallel fashion.
Figure 2. NVIDIA Merlin HugeCTR Hierarchical Parameter Server architecture
GPU embedding cache
The memory bandwidth of GPUs is an order of magnitude higher than that of most CPUs. For example, NVIDIA A100-80 GB provides more than 2 TB/s HBM2 bandwidth. The GPU embedding cache leverages such high memory bandwidth by moving the memory-intensive embedding lookups into the GPU, closer to where the compute happens.
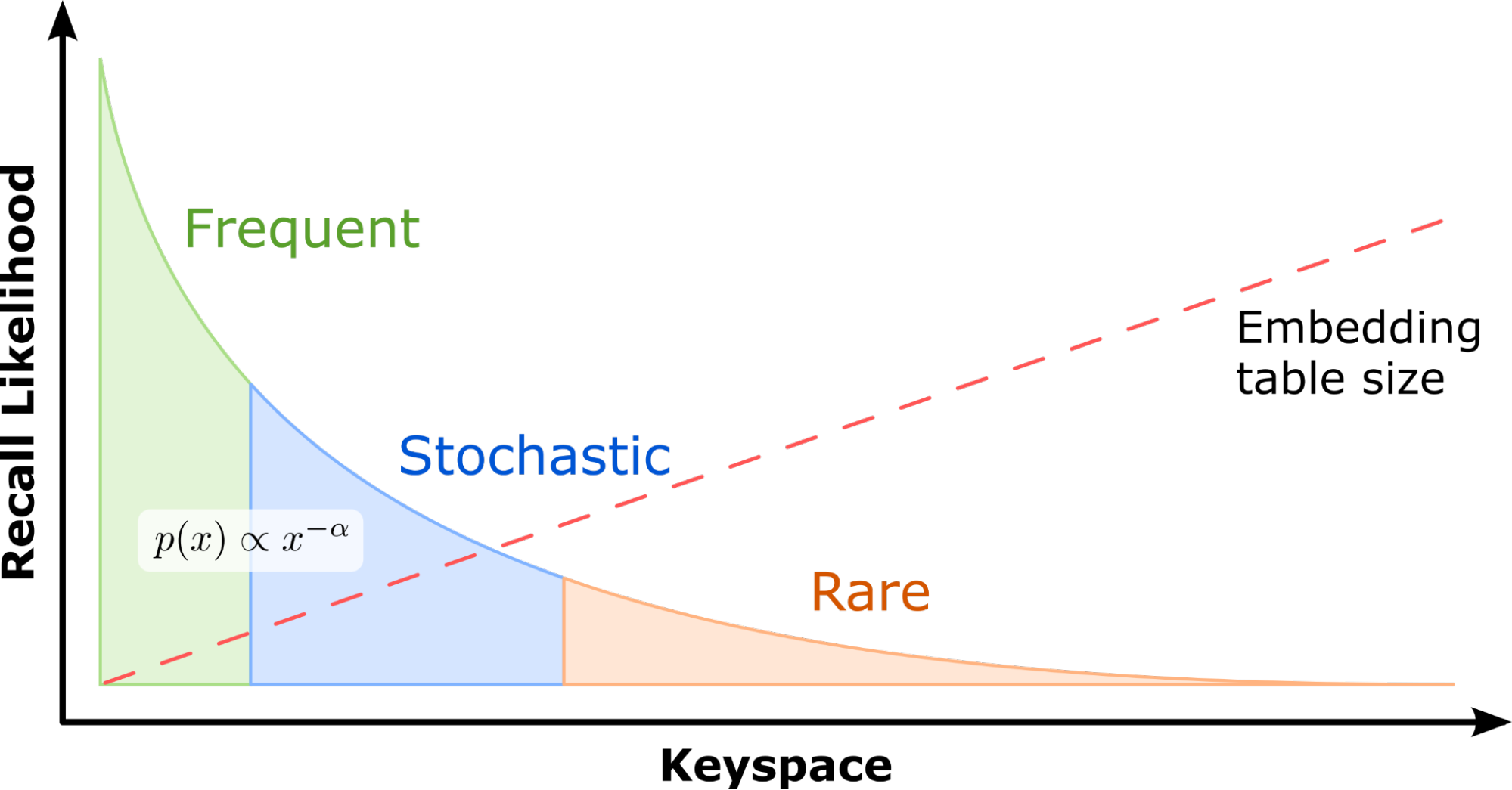
To design a system that efficiently leverages the advantages offered by modern GPUs, it is important to take note of one key observation: with real-world recommendation datasets, a few feature categories typically occur much more frequently than others. For example, in the Criteo 1 TB Click Logs dataset, a popular benchmarking dataset also used in MLPerf, 305K categories out of a total 188M (representing just 0.16%) are referenced by 95.9% of all samples.
This implies that some embeddings are accessed far more frequently than others. Embedding key accesses roughly follow a power-law distribution. Consequently, caching these most frequently accessed parameters in GPU memory will enable recommender systems to take advantage of high GPU memory bandwidth. Individual embedding lookups are independent, which makes GPUs the ideal platform for vector lookup processing, with their ability to run thousands of threads concurrently.
Figure 3. A visualization of the power law distribution
These properties have inspired the design of the HPS GPU embedding cache that retains the hot embeddings in GPU memory, improving lookup performance by reducing additional or repetitive parameter movement across a slower CPU-GPU bus. It is backed by secondary storage that keeps a full copy of all the embedding tables. This is explored more fully below. A unique GPU embedding cache exists for each embedding table associated with each model hosted on a GPU.
Embedding key insertion mechanism
When looked-up embedding keys are missing in the GPU cache during inference, a key insertion is triggered to fetch the related data from lower levels of the hierarchy. The HPS implements both synchronous and asynchronous key insertion mechanisms, and a user-defined hit rate threshold to choose between the two options to balance accuracy and latency.
Synchronous insertion: If the actual hit rate is lower than the hit rate threshold, inference requests are blocked while waiting for the missing key to be inserted in the GPU cache. This typically occurs when the model is freshly loaded, during warm-up or after a significant model update has been conducted.
Asynchronous insertion: If the actual hit rate is higher than the hit rate threshold, a preconfigured default vector is returned immediately to allow the query pipeline to continue execution without delay. The “lazy” insertion itself occurs in the background. This is used when a desirable accuracy has been achieved and the main focus is maintaining low latency. In practical industry scenarios, inference even with full model cached may still have missing features because new items and users may emerge in inference that were never in the training dataset.
GPU embedding cache performance
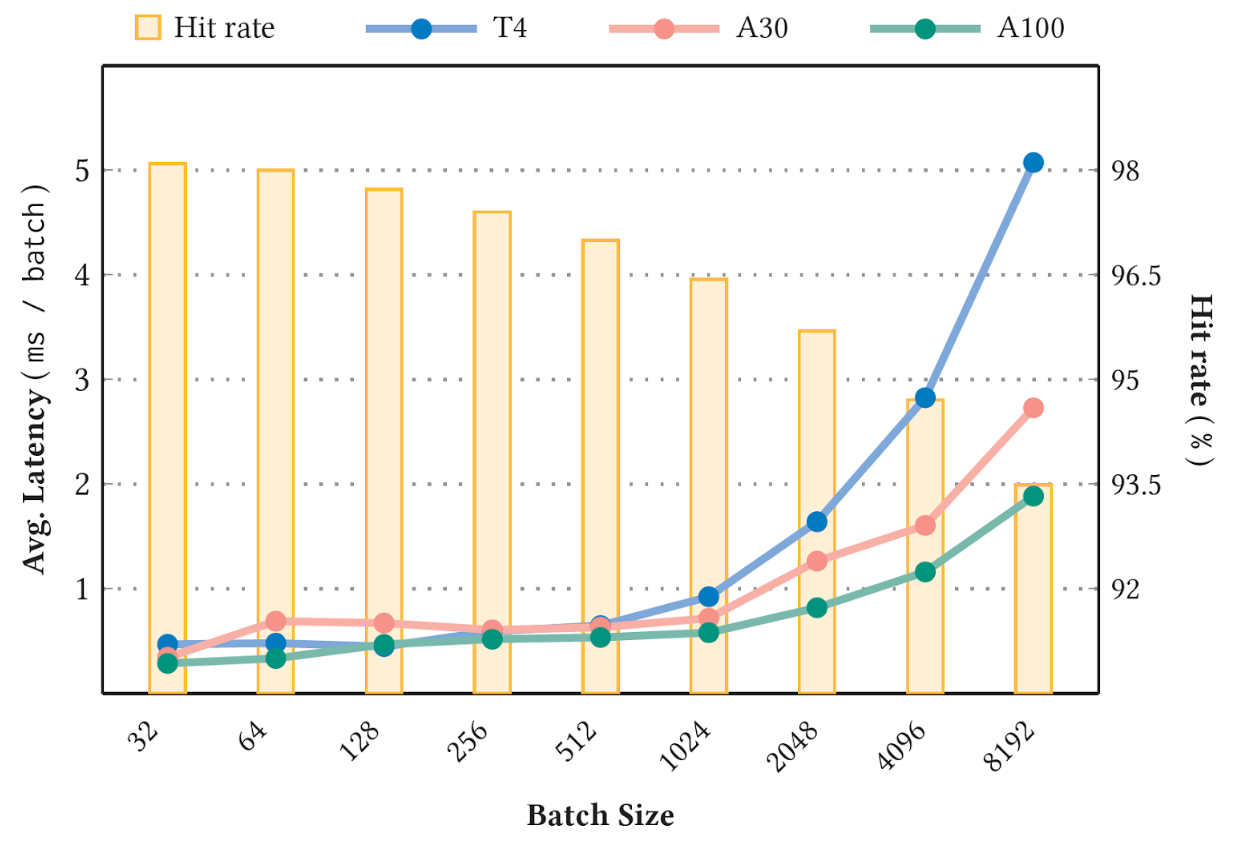
Figure 4, shows the measured inference latency versus hit rate with the Criteo 1 TB Click Logs dataset and the 90 GB Deep Learning Recommendation Model for Personalization and Recommendation Systems (DLRM) model on an NVIDIA T4 (16 GB memory), A30 (24 GB memory) and A100 GPU (80 GB memory), caching 10% of the model size. The hit rate threshold is set to 1.0, so that all key insertions are synchronous. Measurements are taken at the stable stage.
Figure 4. Average latency and GPU embedding cache hit rate for various batch sizes
As can be expected, a higher stable cache hit rate (the bar chart in Figure 4) corresponds to a lower average latency (the line chart in Figure 4). Moreover, a larger batch size also witnesses lower hit rate and higher latency due to the increasing likelihood of keys missing. For more details about the benchmark, see A GPU-Specialized Inference Parameter Server for Large-Scale Deep Recommendation Models.
HPS includes two additional layers to support models that scale beyond GPU memory capacity by leveraging the CPU memory and SSD. These layers are highly configurable to support various backend implementations. The following sections take a closer look at these.
CPU cache
The second-level storage is the CPU cache, accessed through the CPU-GPU bus, and acts as the extended storage for the GPU embedding cache at lower cost. If an embedding key is missing in the GPU embedding cache, HPS turns to querying the CPU cache next.
If the key is found (cache hit), it returns the result and notes the access time. These last-accessed timestamps are used for key eviction later.
If the key is missing, HPS turns to the next layer to fetch the embedding while also scheduling the insertion of the missing embedding vector into CPU cache.
The ‘CPU cache’ layer supports various database backends. HugeCTR HPS provides volatile database examples with a hash map based local CPU memory database implementation, and a Redis cluster-based backend that leverages distributed cluster instances for scalable deployment.
SSD
The lowest level of the cache hierarchy stores an entire copy of each embedding table on either SSDs, hard disks, or a network storage volume at even lower cost. It is particularly effective with datasets that exhibit an extreme long-tail distribution (a very large number of categories, many of which are not referenced very often) where maintaining a high accuracy is critical for the task at hand. The HugeCTR HPS reference configuration maps embedding tables to column groups in a RocksDB database on a local SSD.
The entire model is persisted in each inference node by design. Such resource isolation strategies enhance system availability. The model parameters and inference service can be recovered even if just one node is alive after a catastrophic event.
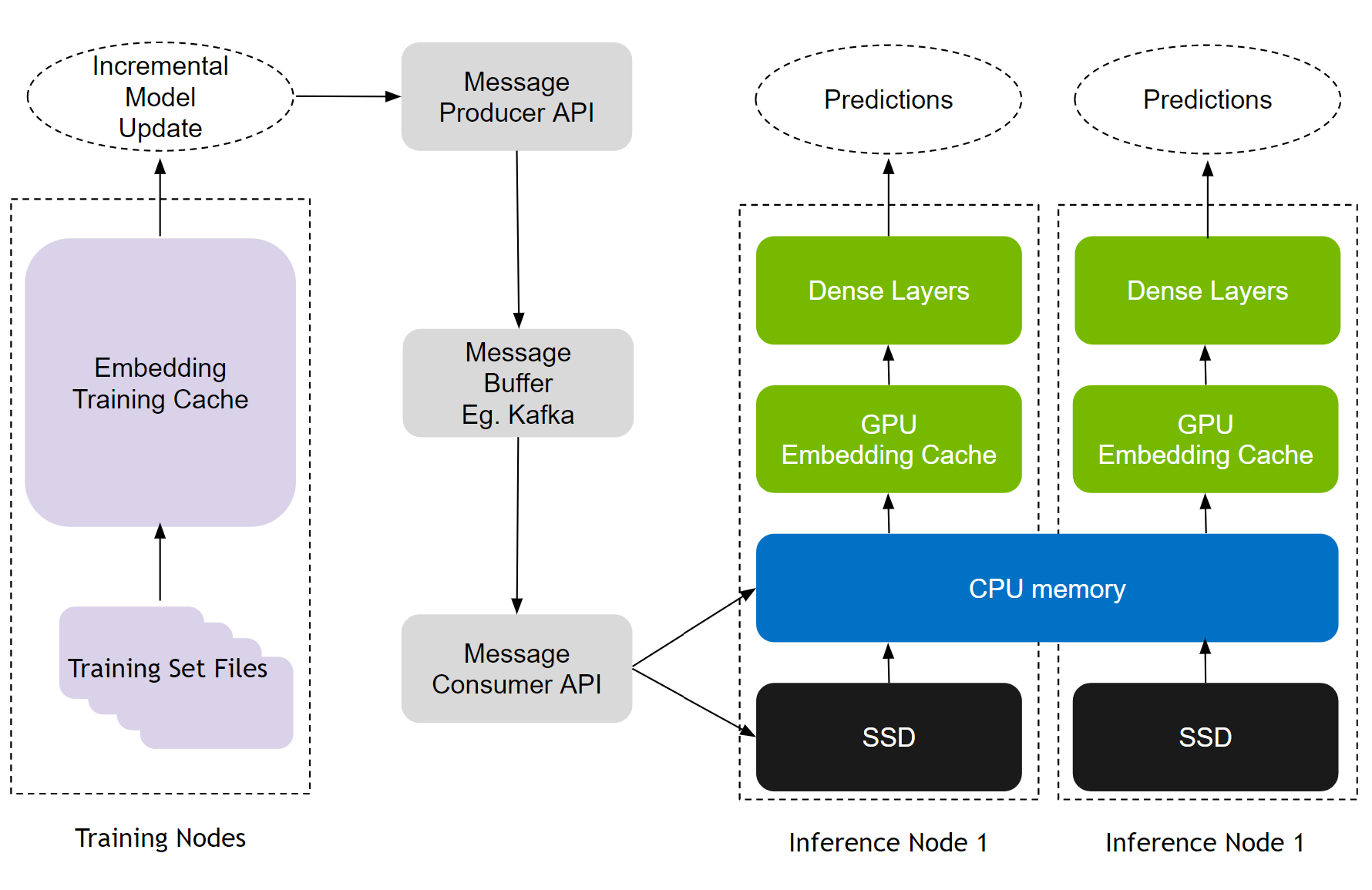
Incremental training update
Recommendation models have two modes of training: offline and online. Online training deploys fresh model updates into real-time production and is critical for recommendation effectiveness. HPS employs a seamless update mechanism through an Apache Kafka-based message buffers to connect training and inference nodes, as illustrated in Figure 5.
The update mechanism aids MLOps workflows, enabling both online/frequent as well as offline/retraining updates with no downtime. It also imparts fault tolerance by design, as training updates continue to queue up in the Kafka message buffer even if inference servers are down. All these capabilities are available to developers through convenient and easy-to-use Python APIs.
HPS performance benchmark
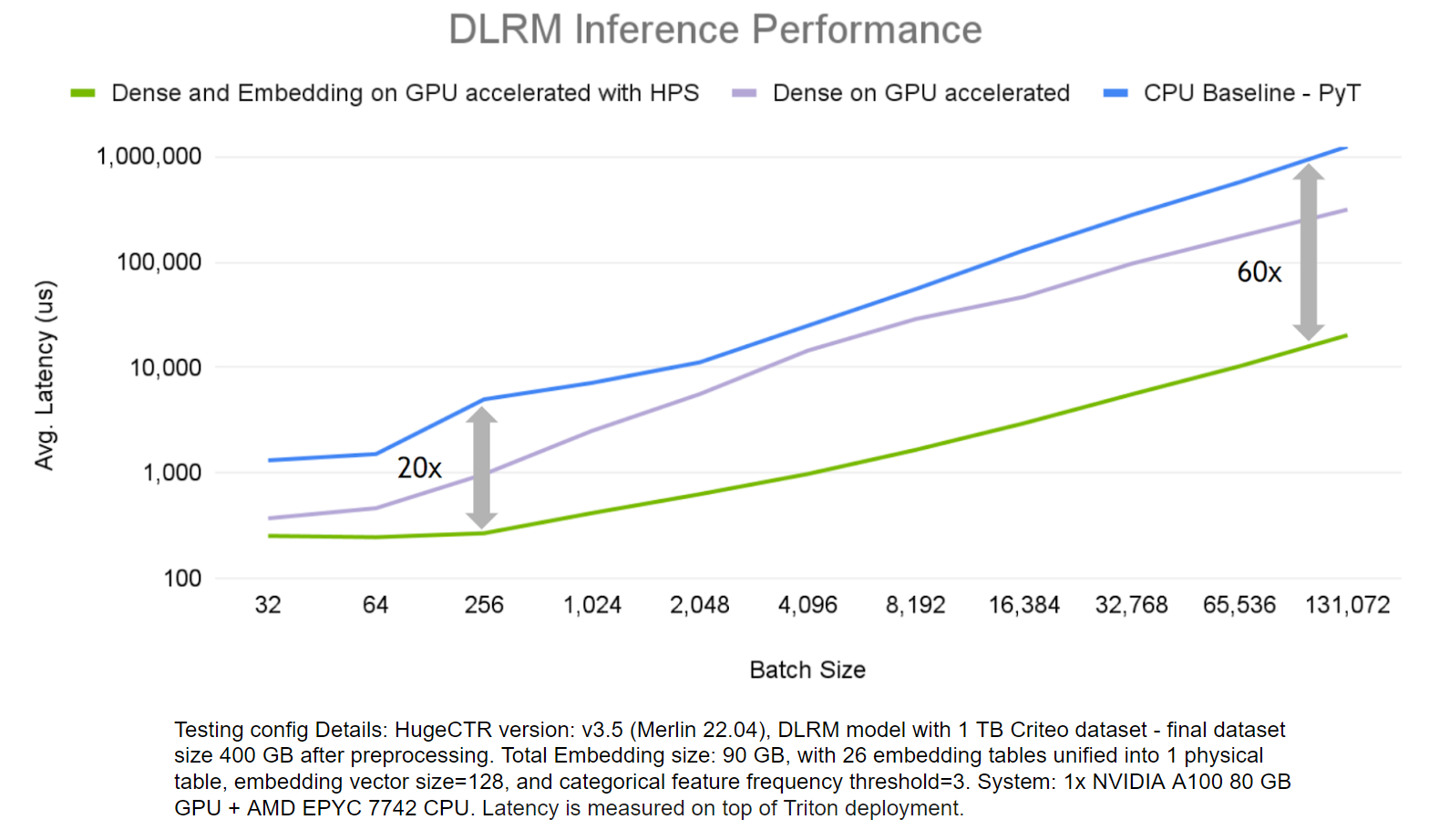
To demonstrate the benefits of HugeCTR HPS, we evaluated its end-to-end inference performance on the DLRM model and Criteo 1 TB Click Logs dataset, and compared it with scenarios where just the dense layer computations run on a GPU, and a CPU-only solution.
Figure 6. Comparison of inference performance
The HPS solution accelerates both embedding and dense layers far outperforms the CPU-only solution, up to 60x on larger batch sizes.
How HPS differs from a CPU PS plus GPU worker solution
You may be familiar with CPU parameter server (PS) plus GPU worker solutions. Table 1 shows how the HPS differs from most PS plus worker solutions.
HPS
CPU PS + GPU Worker
Pipeline focus
Inference
Training and Inference
Embedding lookup GPU accelerated
Yes
No
GPU use
Most frequently accessed embedding tables Dense parameters from MLP
Dense parameters from MLP
Inter GPU Communication
None
None
CPU use
Less frequently accessed embeddings
All embedding tables are sharded across CPUs
Table 1. A comparison of HPS with a CPU parameter server plus GPU worker solution
Patent documents typically use legal and highly technical language, with context-dependent terms that may have meanings quite different from colloquial usage and even between different documents. The process of using traditional patent search methods (e.g., keyword searching) to search through the corpus of over one hundred million patent documents can be tedious and result in many missed results due to the broad and non-standard language used. For example, a “soccer ball” may be described as a “spherical recreation device”, “inflatable sportsball” or “ball for ball game”. Additionally, the language used in some patent documents may obfuscate terms to their advantage, so more powerful natural language processing (NLP) and semantic similarity understanding can give everyone access to do a thorough search.
The patent domain (and more general technical literature like scientific publications) poses unique challenges for NLP modeling due to its use of legal and technical terms. While there are multiple commonly used general-purpose semantic textual similarity (STS) benchmark datasets (e.g., STS-B, SICK, MRPC, PIT), to the best of our knowledge, there are currently no datasets focused on technical concepts found in patents and scientific publications (the somewhat related BioASQ challenge contains a biomedical question answering task). Moreover, with the continuing growth in size of the patent corpus (millions of new patents are issued worldwide every year), there is a need to develop more useful NLP models for this domain.
Today, we announce the release of the Patent Phrase Similarity dataset, a new human-rated contextual phrase-to-phrase semantic matching dataset, and the accompanying paper, presented at the SIGIR PatentSemTech Workshop, which focuses on technical terms from patents. The Patent Phrase Similarity dataset contains ~50,000 rated phrase pairs, each with a Cooperative Patent Classification (CPC) class as context. In addition to similarity scores that are typically included in other benchmark datasets, we include granular rating classes similar to WordNet, such as synonym, antonym, hypernym, hyponym, holonym, meronym, and domain related. This dataset (distributed under the Creative Commons Attribution 4.0 International license) was used by Kaggle and USPTO as the benchmark dataset in the U.S. Patent Phrase to Phrase Matching competition to draw more attention to the performance of machine learning models on technical text. Initial results show that models fine-tuned on this new dataset perform substantially better than general pre-trained models without fine-tuning.
The Patent Phrase Similarity Dataset To better train the next generation of state-of-the-art models, we created the Patent Phrase Similarity dataset, which includes many examples to address the following problems: (1) phrase disambiguation, (2) adversarial keyword matching, and (3) hard negative keywords (i.e., keywords that are unrelated but received a high score for similarity from other models ). Some keywords and phrases can have multiple meanings (e.g., the phrase “mouse” may refer to an animal or a computer input device), so we disambiguate the phrases by including CPC classes with each pair of phrases. Also, many NLP models (e.g., bag of words models) will not do well on data with phrases that have matching keywords but are otherwise unrelated (adversarial keywords, e.g., “container section” → “kitchen container”, “offset table” → “table fan”). The Patent Phrase Similarity dataset is designed to include many examples of matching keywords that are unrelated through adversarial keyword match, enabling NLP models to improve their performance.
Each entry in the Patent Phrase Similarity dataset contains two phrases, an anchor and target, a context CPC class, a rating class, and a similarity score. The dataset contains 48,548 entries with 973 unique anchors, split into training (75%), validation (5%), and test (20%) sets. When splitting the data, all of the entries with the same anchor are kept together in the same set. There are 106 different context CPC classes and all of them are represented in the training set.
Anchor
Target
Context
Rating
Score
acid absorption
absorption of acid
B08
exact
1.0
acid absorption
acid immersion
B08
synonym
0.75
acid absorption
chemically soaked
B08
domain related
0.25
acid absorption
acid reflux
B08
not related
0.0
gasoline blend
petrol blend
C10
synonym
0.75
gasoline blend
fuel blend
C10
hypernym
0.5
gasoline blend
fruit blend
C10
not related
0.0
faucet assembly
water tap
A22
hyponym
0.5
faucet assembly
water supply
A22
holonym
0.25
faucet assembly
school assembly
A22
not related
0.0
A small sample of the dataset with anchor and target phrases, context CPC class (B08: Cleaning, C10: Petroleum, gas, fuel, lubricants, A22: Butchering, processing meat/poultry/fish), a rating class, and a similarity score.
Generating the Dataset To generate the Patent Phrase Similarity data, we first process the ~140 million patent documents in the Google Patent’s corpus and automatically extract important English phrases, which are typically noun phrases (e.g., “fastener”, “lifting assembly”) and functional phrases (e.g., “food processing”, “ink printing”). Next, we filter and keep phrases that appear in at least 100 patents and randomly sample around 1,000 of these filtered phrases, which we call anchor phrases. For each anchor phrase, we find all of the matching patents and all of the CPC classes for those patents. We then randomly sample up to four matching CPC classes, which become the context CPC classes for the specific anchor phrase.
We use two different methods for pre-generating target phrases: (1) partial matching and (2) a masked language model (MLM). For partial matching, we randomly select phrases from the entire corpus that partially match with the anchor phrase (e.g., “abatement” → “noise abatement”, “material formation” → “formation material”). For MLM, we select sentences from the patents that contain a given anchor phrase, mask them out, and use the Patent-BERT model to predict candidates for the masked portion of the text. Then, all of the phrases are cleaned up, which includes lowercasing and the removal of punctuation and certain stopwords (e.g., “and”, “or”, “said”), and sent to expert raters for review. Each phrase pair is rated independently by two raters skilled in the technology area. Each rater also generates new target phrases with different ratings. Specifically, they are asked to generate some low-similarity and unrelated targets that partially match with the original anchor and/or some high-similarity targets. Finally, the raters meet to discuss their ratings and come up with final ratings.
Dataset Evaluation To evaluate its performance, the Patent Phrase Similarity dataset was used in the U.S. Patent Phrase to Phrase Matching Kaggle competition. The competition was very popular, drawing about 2,000 competitors from around the world. A variety of approaches were successfully used by the top scoring teams, including ensemble models of BERT variants and prompting (see the full discussion for more details). The table below shows the best results from the competition, as well as several off-the-shelf baselines from our paper. The Pearson correlation metric was used to measure the linear correlation between the predicted and true scores, which is a helpful metric to target for downstream models so they can distinguish between different similarity ratings.
The baselines in the paper can be considered zero-shot in the sense that they use off-the-shelf models without any further fine-tuning on the new dataset (we use these models to embed the anchor and target phrases separately and compute the cosine similarity between them). The Kaggle competition results demonstrate that by using our training data, one can achieve significant improvements compared with existing NLP models. We have also estimated human performance on this task by comparing a single rater’s scores to the combined score of both raters. The results indicate that this is not a particularly easy task, even for human experts.
Performance of popular models with no fine-tuning (zero-shot), models fine-tuned on the Patent Phrase Similarity dataset as part of the Kaggle competition, and single human performance.
Conclusion and Future Work We present the Patent Phrase Similarity dataset, which was used as the benchmark dataset in the U.S. Patent Phrase to Phrase Matching competition, and demonstrate that by using our training data, one can achieve significant improvements compared with existing NLP models.
Additional challenging machine learning benchmarks can be generated from the patent corpus, and patent data has made its way into many of today’s most-studied models. For example, the C4 text dataset used to train T5 contains many patent documents. The BigBird and LongT5 models also use patents via the BIGPATENT dataset. The availability, breadth and open usage terms of full text data (see Google Patents Public Datasets) makes patents a unique resource for the research community. Possibilities for future tasks include massively multi-label classification, summarization, information retrieval, image-text similarity, citation graph prediction, and translation. See the paper for more details.
Acknowledgements This work was possible through a collaboration with Kaggle, Satsyil Corp., USPTO, and MaxVal. Thanks to contributors Ian Wetherbee from Google, Will Cukierski and Maggie Demkin from Kaggle. Thanks to Jerry Ma, Scott Beliveau, and Jamie Holcombe from USPTO and Suja Chittamahalingam from MaxVal for their contributions.
Sophia Abraham always thought she would become a medical doctor. She is now pursuing a Ph.D. in computer science and computer engineering at the University of…
Sophia Abraham always thought she would become a medical doctor. She is now pursuing a Ph.D. in computer science and computer engineering at the University of Notre Dame.
How did this aspiring medical doctor end up programming AI to recognize invasive grass species in Australia and designing drones to help with search and rescue efforts?
Many of Sophia’s aspirations originally stemmed from a romanticized view of a doctor’s role. But after hours spent working in a neuroscience lab and shadowing doctors, she realized she had a stronger passion for mechanical engineering. Despite her family’s disapproval of changing majors, she decided to take a chance on a field that interested her.
Following a passion
Sophia adjusted course after completing a mechanical engineering internship at a government think tank and seeing what the data science team was doing. She discovered that what truly interested her was the art of computer science.
“If mechanical engineers are creating the body, computer scientists are breathing life into the body,” she explained. “I realized I really wanted to be in the area of breathing life into the creation of whatever I was doing.”
Sophia decided to apply directly to several computer science Ph.D. programs. While applying for graduate programs is challenging and competitive for most students, Sophia faced the additional uncertainty of whether her background would even meet the entrance requirements.
With much perseverance and hard work, Sophia was accepted into many Ph.D. programs, despite having no relevant experience. As she spoke with professors and faculty members, many were interested in how she could translate her previous work and knowledge into their current vision and systems.
Accepting new opportunities
Sophia’s experience in her graduate program has not been conventional. Her undergraduate background and willingness to learn led to some really interesting and varied experiences in AI within her program and internships. She began training AI models in 3D mesh reconstruction, often used in various computer vision applications such as robotics, computer graphics, and augmented reality.
Figure 1. A car-shaped 3D model made by deforming a 3D spherical mesh from RGB images that Sophia created during one of her internships
During an internship with Johns Hopkins University, she trained AI agents in the video game StarCraft II in goal-oriented action programming. This AI technique involves dynamic planning with a sequence of actions that activates different goals depending on the progression of the AI within the game.
To continue expanding her opportunities in AI, Sophia worked on a computer vision project using drones to recognize lost or injured persons in collaboration with rescue personnel. The model recognizes someone drowning in a river or finds someone through obscuring objects or terrain. Sophia has used similar computer vision techniques to partner with researchers in Australia to identify invasive grass species.
Figure 2. An example from one of Sophia’s test runs in the video game StarCraft II
Finding a niche in AI research
After a long and winding journey, Sophia feels as though she is finally starting to find a niche at the intersection of ecology and machine learning. Her hope is to work on developing technologies to not only combat issues like the biodiversity crisis, but also to equip farmers with easier methods to manage crops and diagnose diseases. Through her work in this field, she hopes to mitigate issues that farmers currently face and help them through her work in artificial intelligence and machine learning.
Although Sophia’s background was unconventional for a computer science Ph.D. student, she believes that it was her drive to teach herself the material and her deep curiosity to learn and understand the phenomena that she was unfamiliar with that allowed her to progress in the field of AI. She also praises her peers, who took the time to explain challenging concepts and make her transition into the graduate curriculum as seamless as possible.
The learning curve was undoubtedly a steep one. Still, she believes that the barrier to entry was more difficult in perception than in reality and that it was feasible with the right resources and training. So despite having no coding background, she was able to overcome her lack of a traditional background and realize success in her pursuit of a career in AI.
Sophia took the road less traveled and made decisions that many questioned. Still, she followed her heart and discovered newfound passions for ecology, machine learning, and AI. Her previous experiences guided her to what she really wanted to pursue, and it turned out to be one of the most rewarding decisions for her—both personally and professionally.
Curious to know more about working in the field of AI? Check out How to Start a Career in AI for a few key tips. Then get started with free, on-demand NVIDIA AI essentials that will equip you with the fundamentals of AI, data science, graphics, and robotics.
Embeddings play a key role in deep learning recommender models. They are used to map encoded categorical inputs in data to numerical values that can be…
Embeddings play a key role in deep learning recommender models. They are used to map encoded categorical inputs in data to numerical values that can be processed by the math layers or multilayer perceptrons (MLPs).
Embeddings often constitute most of the parameters in deep learning recommender models and can be quite large, even reaching into the terabyte scale. It can be difficult to fit them in a single GPU’s memory during training.
As such, modern recommenders may require a combination of model parallel and data parallel distributed training approaches to achieve reasonable training times, and the best utilization of available GPU compute.
NVIDIA Merlin Distributed-Embeddings, a library for training large embedding based (for example, recommenders) models in TensorFlow 2 enables you to accomplish this easily with just a few lines of code.
Background
With data-parallel distributed training on GPUs, the whole model is replicated on each GPU worker. A batch of data is split among the multiple GPUs during training, and each device independently operates on its own shard of data.
This allows scaling computations to higher quantities of data with larger batches. The gradients calculated during backpropagation are accumulated across all devices using a reduction operation (for example, horovod.tensorflow.allreduce) for a synchronous parameter update.
With model parallel distributed training, the model parameters are split between various workers. This is a more suitable way to distribute large embedding tables. Training requires using an all-to-all communication primitive (for example, horovod.tensorflow.alltoall) such that workers can get access to the parameters that are not in their partition.
In a related previous post, Training a Recommender System on DGX A100 with 100B+ Parameters in TensorFlow 2, Tomasz discussed how distributing embeddings for a 113 billion-parameter DLRM model across multiple NVIDIA GPUs helped achieve a 672x speedup over a CPU-only solution. This significant improvement can potentially bring down training times from days to minutes! This is accomplished by distributing embedding tables through model parallelism and performing the much-smaller math-intensive MLP layer computation through data parallelism.
Compared to storing the embeddings in CPU memory, this hybrid approach enables you to use the high-memory bandwidth of the GPU memory for memory-bound embedding lookups. It also accelerates the MLP layers using the compute powers among several GPU devices. For reference, an NVIDIA A100-80GB GPU has 80 GB HBM2 memory with a bandwidth at over 2 TB/s).
Figure 1. General “hybrid-parallel” approach for training large recommender systems
The embedding tables can be split “table-wise” (for example, embedding tables 0 and N), “column-wise” (for example, embedding table 2), or “row-wise”. The MLP layers are replicated across all GPUs. Numerical features can be fed directly into the MLP layers and are not represented in the figure.
However, implementing such a complex hybrid parallel training approach is not trivial and requires a domain expert to engineer several hundred lines of low-level code to develop and optimize training.
To make it more widely accessible, the NVIDIA Merlin Distributed-Embedding library provides an easy-to-use wrapper to democratize model parallelism in TensorFlow 2 with only three lines of Python code. It provides a scalable model parallel wrapper that automatically distributes embedding tables to multiple GPUs, in addition to some efficient embedding operations that cover and extend TensorFlow’s embedding functionalities. Here’s how it enables hybrid-parallelism.
Distributed model parallel
NVIDIA Merlin Distributed-Embeddings provides the distributed_embeddings.dist_model_parallel module. It helps distribute embeddings across several GPU workers without any complex code to handle cross-worker communication with primitives like all2all. The following code example shows the usage of this API:
import dist_model_parallel as dmp
class MyEmbeddingModel(tf.keras.Model):
def __init__(self, table_sizes):
...
self.embedding_layers = [tf.keras.layers.Embedding(input_dim, output_dim) for input_dim, output_dim in table_sizes]
# 1. Add this line to wrap list of embedding layers used in the model
self.embedding_layers = dmp.DistributedEmbedding(self.embedding_layers)
def call(self, inputs):
# embedding_outputs = [e(i) for e, i in zip(self.embedding_layers, inputs)]
embedding_outputs = self.embedding_layers(inputs)
...
To run the dense layers in a data-parallel fashion with Horovod, replace Horovod’sDistributed GradientTape and broadcast methods with their equivalent in Distributed Embeddings. The following example has been taken directly from the Horovod documentation and modified accordingly.
To demonstrate the benefits of using NVIDIA Merlin Distributed-Embeddings, we show benchmarks on a DLRM model trained on the Criteo 1TB dataset, as well as various synthetic models with up to ~3 TiB embedding table sizes.
The benchmarks section in the README provides more insight into performance numbers.
A DLRM model with 113 billion parameters (421 GiB model size) was trained on the Criteo Terabyte Click Logs dataset, over three different hardware setups:
A CPU-only solution.
A single-GPU solution, where CPU memory is used to store the largest embedding tables.
A hybrid-parallel solution using an NVIDIA DGX A100-80GB with 8 GPUs. This leverages the model parallel wrapper and the Embedding API provided by NVIDIA Merlin Distributed-Embeddings.
Hardware
Description
Training Throughput (samples/second)
Speedup over CPU
2 x AMD EPYC 7742
Both MLP layers and embeddings on CPU
17.7k
1x
1 x A100-80GB; 2 x AMD EPYC 7742
Large embeddings on CPU, everything else on GPU
768k
43x
DGX A100 (8xA100-80GB)
Hybrid parallel with NVIDIA Merlin Distributed-Embeddings, whole model on GPU
12.1M
683x
Table 1. Training throughput and speedup for various setups
We observe that a Distributed-Embeddings solution on a DGX-A100 provides a whopping 683x speedup over a CPU-only solution! We also notice a significant improvement in performance over a single-GPU solution. This is because retaining all the embeddings in GPU memory eliminates the overhead of embedding lookups over the CPU-GPU interface.
Synthetic models benchmark
To demonstrate the scalability of the solution further, we created synthetic DLRM models of varying sizes (Table 2). For more information about model generation methodology and the training script, see the NVIDIA-Merlin/distributed-embeddings GitHub repo.
Model
Total number of embedding tables
Total embedding size (GiB)
Tiny
55
4.2
Small
107
26.3
Medium
311
206.2
Large
612
773.8
Jumbo
1,022
3,109.5
Table 2. Synthetic model sizes
Each synthetic model was trained using one or more DGX-A100-80GB nodes, with a global batch size of 65,536, and the Adagrad optimizer. You can see from Table 3 that NVIDIA Merlin Distributed-Embeddings can easily train terabyte-scale models on hundreds of GPUs.
Model
Training step time (ms)
1 GPU
8 GPU
16 GPU
32 GPU
128 GPU
Tiny
17.6
3.6
3.2
Small
57.8
14.0
11.6
7.4
Medium
64.4
44.9
31.1
17.2
Large
65.0
33.4
Jumbo
102.3
Table 3. Training step time (ms) for synthetic models on various hardware configurations
On the other hand, even for models that can fit into a single GPU, Distributed-Embeddings’ model parallelism still provides substantial speedup with multi-GPU, compared to conventional data parallelism. This is shown in Table 4 where a tiny model runs on DGX A100-80GB.
Solution
Training step time (ms)
1 GPU
2 GPU
4 GPU
8 GPU
NVIDIA Merlin Distributed Embeddings Model Parallel
17.7
11.6
6.4
4.2
Native TensorFlow Data Parallel
19.9
20.2
21.2
22.3
Table 4. Comparing training step time (ms) for the “Tiny” model (4.2GiB) between an NVIDIA Merlin Distributed Embeddings Model Parallel and a Native TensorFlow Data Parallel solution for embeddings
A global batch size of 65,536 and the Adagrad optimizer were used for this experiment.
Autonomous vehicle developers now have access to flexible, scalable, and high-performance hardware and software to build the next generation of safer, more…
Autonomous vehicle developers now have access to flexible, scalable, and high-performance hardware and software to build the next generation of safer, more efficient transportation.
NVIDIA DRIVE AGX Orin Developer Kit is now available for general access. Powered by a single Orin system-on-a-chip (SoC), the AI compute platform includes the hardware, software, and sample applications needed to develop production-level autonomous vehicles. It’s also modular, sharing the same design as NVIDIA Jetson, NVIDIA Isaac, and NVIDIA Clara AGX platforms.
With a rich automotive I/O, you have the flexibility to expand and iterate upon your autonomous driving solutions. DRIVE AGX Orin includes a base kit for bench development and an add-on vehicle kit for vehicle installation. The platform also has a smaller footprint than previous generations, with system and accessories included in a single box.
Additionally, NVIDIA DRIVE OS 6 is now available on the NVIDIA DRIVE Developer Download page, providing the latest operating system purpose-built for autonomous vehicles.
NVIDIA DRIVE OS includes NvMedia for sensor input processing, NVIDIA CUDA libraries for efficient parallel computing implementations, and NVIDIA TensorRT for real-time AI inference.
The current version available is DRIVE OS 6.0.4, which supports sensors included in the NVIDIA DRIVE Hyperion 8.1 platform architecture.

") Expand your accelerated computing skills at GTC 2022 with hands-on NVIDIA Deep Learning Institute workshops.
Expand your accelerated computing skills at GTC 2022 with hands-on NVIDIA Deep Learning Institute workshops. Discover the latest traditional and neural rendering technologies and how they are accelerating professional visualization.
Discover the latest traditional and neural rendering technologies and how they are accelerating professional visualization. In computer graphics, the right balance between direct and indirect lighting elevates the photorealism of a scene.
In computer graphics, the right balance between direct and indirect lighting elevates the photorealism of a scene.") Recommendation systems are widely used today to personalize user experiences and improve customer engagement in various settings like e-commerce, social media,…
Recommendation systems are widely used today to personalize user experiences and improve customer engagement in various settings like e-commerce, social media,…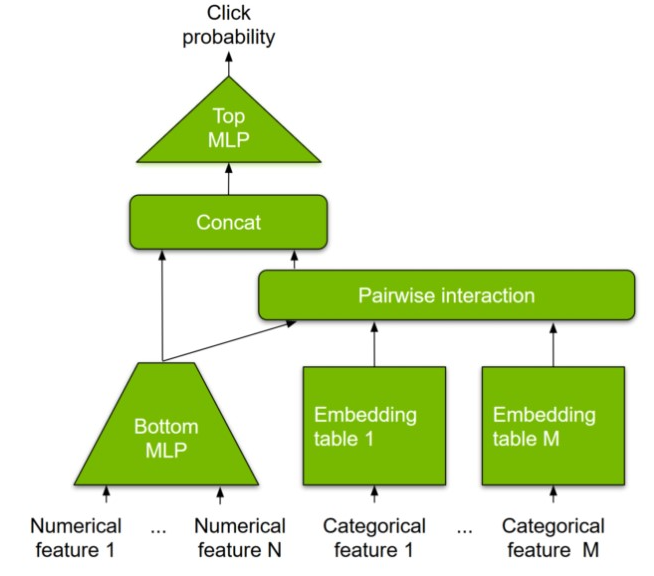
 Sophia Abraham always thought she would become a medical doctor. She is now pursuing a Ph.D. in computer science and computer engineering at the University of…
Sophia Abraham always thought she would become a medical doctor. She is now pursuing a Ph.D. in computer science and computer engineering at the University of…
 Embeddings play a key role in deep learning recommender models. They are used to map encoded categorical inputs in data to numerical values that can be…
Embeddings play a key role in deep learning recommender models. They are used to map encoded categorical inputs in data to numerical values that can be…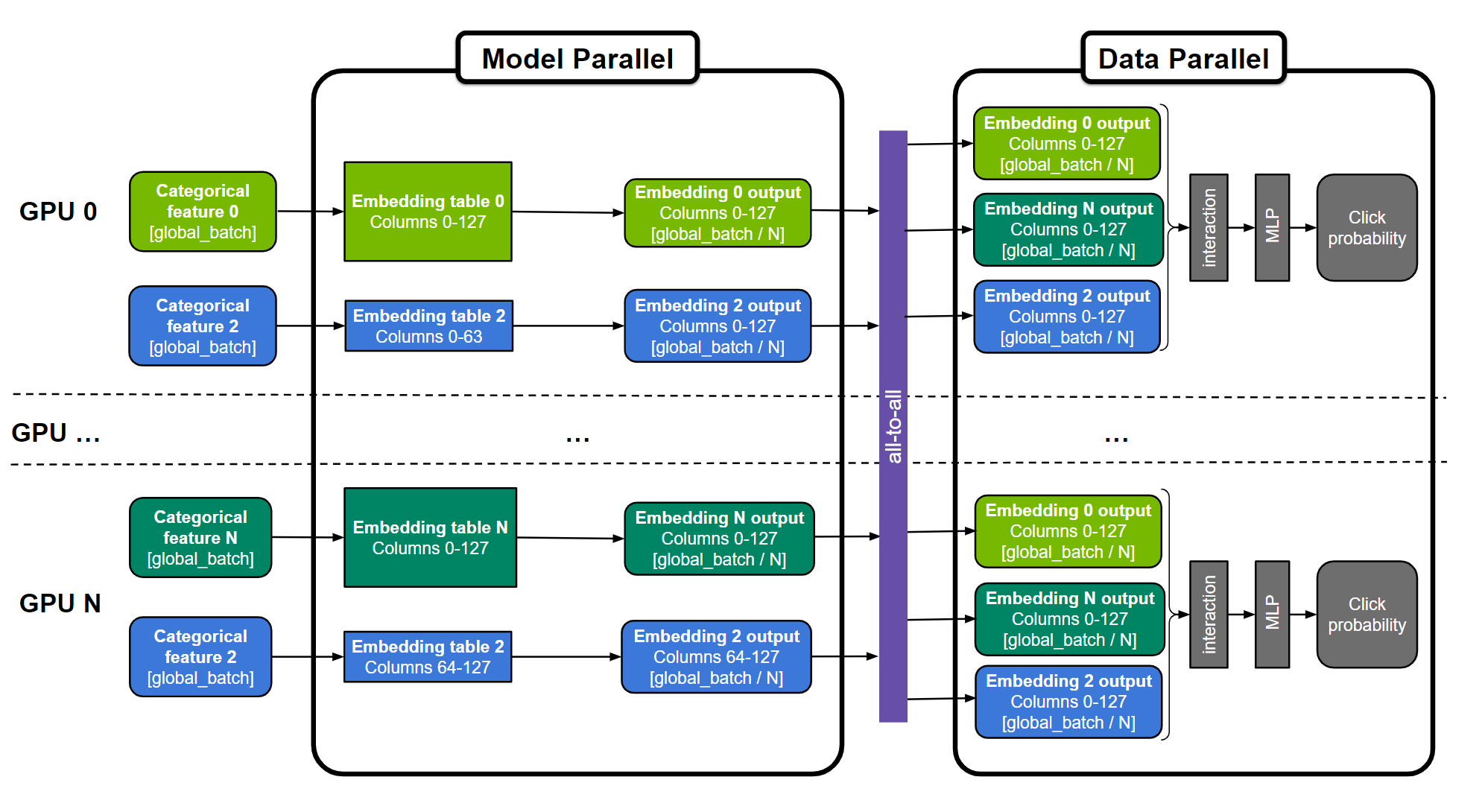
 Autonomous vehicle developers now have access to flexible, scalable, and high-performance hardware and software to build the next generation of safer, more…
Autonomous vehicle developers now have access to flexible, scalable, and high-performance hardware and software to build the next generation of safer, more…