3D Artist Daniel Martinger discusses how he captured the attention of the computer graphics world with a path-traced rendered scene using an NVIDIA RTX 3090 and Unreal Engine 5.
NVIDIA was fortunate enough to speak with 3D prop and environment artist Daniel Martinger, who captured the attention of the computer graphics world with his stunningly realistic path-traced rendered scene entitled “The Carpenter’s Cellar.”
Below, Martinger discusses how he created this piece of work using an NVIDIA RTX 3090 and Unreal Engine 5, along with where he finds inspiration.
Figure 1. Fully path-traced scene in Unreal Engine 5.
Where do you look for inspiration and ideas? Martinger: Before I start a project, I really need to have a clear vision and an idea in my mind. I need to feel very excited to start the project. When I am outside, I often observe objects around me in nature and how lightning affects them. For example, during the day when I am outside or inside watching a movie—I get ideas of an environment and want to recreate it in 3D.
My ideas come from my surroundings. If I watch a movie and I see something cool that interests me like a messy room, I start to google reference photos of similar rooms. If I like the feeling of the room, there’s the possibility of combining that feeling with another theme. In this case I spent time searching for cellar reference photos like old cellars, just to get a feeling for the project.
Google and Pinterest are really nice sources. I gathered my references on a mood board. I usually have a lot of references just to combine them visually in my mind. In this project I really wanted daylight to spread throughout the room and explore Unreal Engine’s new lightning tech.
Why did you choose Unreal Engine 5 for this project? Martinger: In school we learned another game engine, and I am always looking to learn and update my skills. I also saw a lot of videos about Unreal Engine 5 and was very impressed, so I decided to use Unreal Engines’ new tech to present my art.
I have leveraged NVIDIA GPUs since I was 15. When the [RTX] 3090 came out, it was like a 3D artist’s dream. The VRAM plays a big role here compared to other cards. You can never have enough VRAM as a 3D artist!
The power of the 3090 is amazing. Texturing programs and the game engine, it all just works, there’s been no lag or stuttering. My computer didn’t “complain” much, I can work with 8k textures without any problems.
Did you incorporate any DXR features? Martinger: Yes, I enabled DX12 and I decided to go with full path tracing for the scene. I know I had to enable DirectX 12 for the path tracer and hardware ray tracing to be able to use path tracing, I played around with some ray tracing stuff in post effects like global illumination, ray tracing, and reflections, but I only used the path tracer for rendering images and videos. I played around with the real-time features, but it didn’t give me the quality of the path tracer.
How did you feel about the visual comparison between the Unreal Engine 5 path tracer versus offline renderers or other engines you’ve used? Martinger: I haven’t used many other offline renderers, but I have seen a lot of art created in Arnold. It feels like path tracing in Unreal Engine is very similar to Arnold. In Unreal Engine 5 the path-tracing feature is very user friendly. This is the first time I used an offline renderer, so I don’t have much to compare it with. I have only worked with one other game engine before Unreal Engine. Even without path tracing I think Unreal Engine is a very powerful engine for artists and can achieve amazing realistic results.
Are you using one or two light sources in the path traced render? Martinger: I wanted daylight to come into the room, so I used a skylight and a directional light as the sun source. I tweaked the settings to achieve the look I wanted, and yeah, path tracing just works. In real time you need to do a lot more work and tweaking to get a similar look as path tracing.
What are your biggest takeaways from this project? Martinger: Keeping a realistic goal and timeline in mind is key. Do something you can deliver in a reasonable amount of time, and most importantly detailed planning to map out the approach, project flow, and process.
I show how NVIDIA Isaac Sim and NVIDIA Isaac ROS GEMs can be used with the Nav2 navigation stack for robotic navigation.
NVIDIA Isaac ROS GEMs are ROS packages that optimize AI-based robotics applications to run on NVIDIA GPUs and the Jetson platform. There is a growing interest in integrating these packages with the Nav2 project to help autonomous robots successfully navigate around dynamic environments.
This work is done entirely in simulation and can be used as a starting point for transferring robotic capabilities from simulation to the real world (Sim2Real).
In this post, I focus on a real-world problem where robots are damaged due to collisions with forklift tines in warehouses. A forklift is an industrial truck used to move heavy objects over short distances. It has extensions called tines (or forks), which slide under and lift objects.
Figure 1. Forklifts
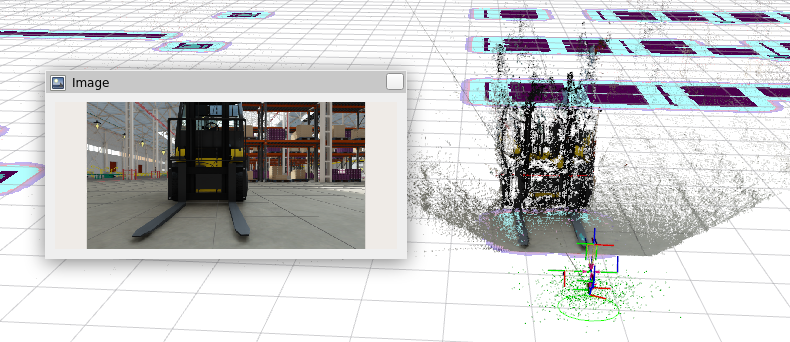
Primarily used robot sensors (lidar) can detect the body of a forklift, but not the tines, which are close to the ground. There is also a need for other sensors in this scenario that can detect these tines. In this project, you use two RGB cameras on the robot in simulation. The images from these cameras are used to calculate disparity using the Isaac ROS stereo GEM.
From disparity, the stereo GEM generates a point cloud, which contains information about where all the objects that are in the cameras’ field of view are in the environment. This information is used to update the navigation node such that the robot’s path is changed if a collision can potentially occur.
Figure 2. Reproducing the real-world problem in NVIDIA Isaac Sim: robots colliding with forklift tines
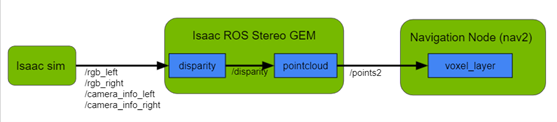
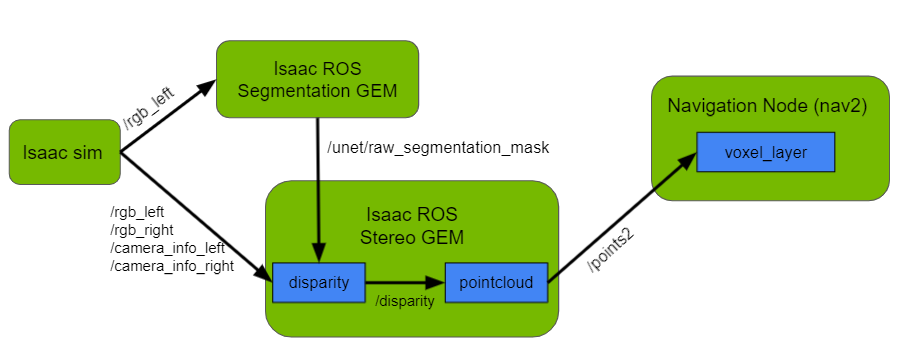
Figure 3 shows the fundamental workflow of the project.
You use a warehouse environment in NVIDIA Isaac Sim, which includes the Carter robot and forklifts. Following the ROS2 Navigation example, generate an occupancy map that is used by the Nav2 stack to avoid static obstacles like shelves. Dynamic or moving obstacles including forklifts and trolleys are added to the environment after creating the occupancy map. This is to mimic the real world, where objects change in the environment without the robot’s knowledge.
It is important to note the offset between the Carter robot’s left and right stereo cameras in NVIDIA Isaac Sim for the NVIDIA Isaac ROS Stereo GEM to generate disparity correctly. Ensure that the ROS2 bridge is enabled in NVIDIA Isaac Sim before starting simulation so that ROS2 messages can be communicated outside NVIDIA Isaac Sim.
NVIDIA Isaac ROS stereo GEM and Nav2
The Nav2 stack uses global and local costmaps to steer the robot clear of obstacles. The local costmap is updated based on new, moving obstacles in the environment and can take laser scans and point clouds as input from robotic sensors.
As laserscan from lidar fails to pick up forklift tines in real scenarios, you can address this problem by using point clouds from stereo images, which are passed to Nav2. These point clouds are generated using the NVIDIA Isaac ROS Stereo GEM.
Figure 4. Point cloud generated using the NVIDIA Isaac ROS stereo GEM when the robot is in front of the forklift
On the right side of Figure 4, the light blue region under the tines shows that the Nav2 local costmap has been updated to represent an obstacle there, which the robot can now avoid. The average rate of images from NVIDIA Isaac Sim is 20 FPS and that of the point cloud from the stereo GEM is 16 FPS.
The stereo GEM generates a disparity image and then a point cloud for all objects that are seen in the left and right images from the robot’s cameras. Using the Isaac ROS segmentation GEM, this disparity can be filtered to generate a point cloud that includes only points belonging to objects of interest, for instance, forklift tines.
The next section explains this filtering in more detail.
Disparity filtering using the NVIDIA Isaac ROS segmentation GEM
Here’s how deep learning models trained on synthetically generated data can be used with NVIDIA Isaac ROS inference GEMs. You achieve the same goal: Help robots avoid forklift tines in simulation using the GEMs along with the Nav2 stack.
However, instead of generating a point cloud for all objects in the robot’s cameras’ field of view, you filter and generate a focused point cloud only for forklift tines.
Figure 5. Workflow to perform disparity filtering using NVIDIA Isaac ROS segmentation and stereo GEMs
I used a segmentation model trained on images of forklift tines. The NVIDIA Isaac ROS segmentation GEM takes RGB images from the robot in simulation and generates the corresponding segmentation images using the given model.
Any model can be used with this pipeline to filter specific objects based on the use case. Just generate (Replicator Composer) and train (TAO) on your data of interest!
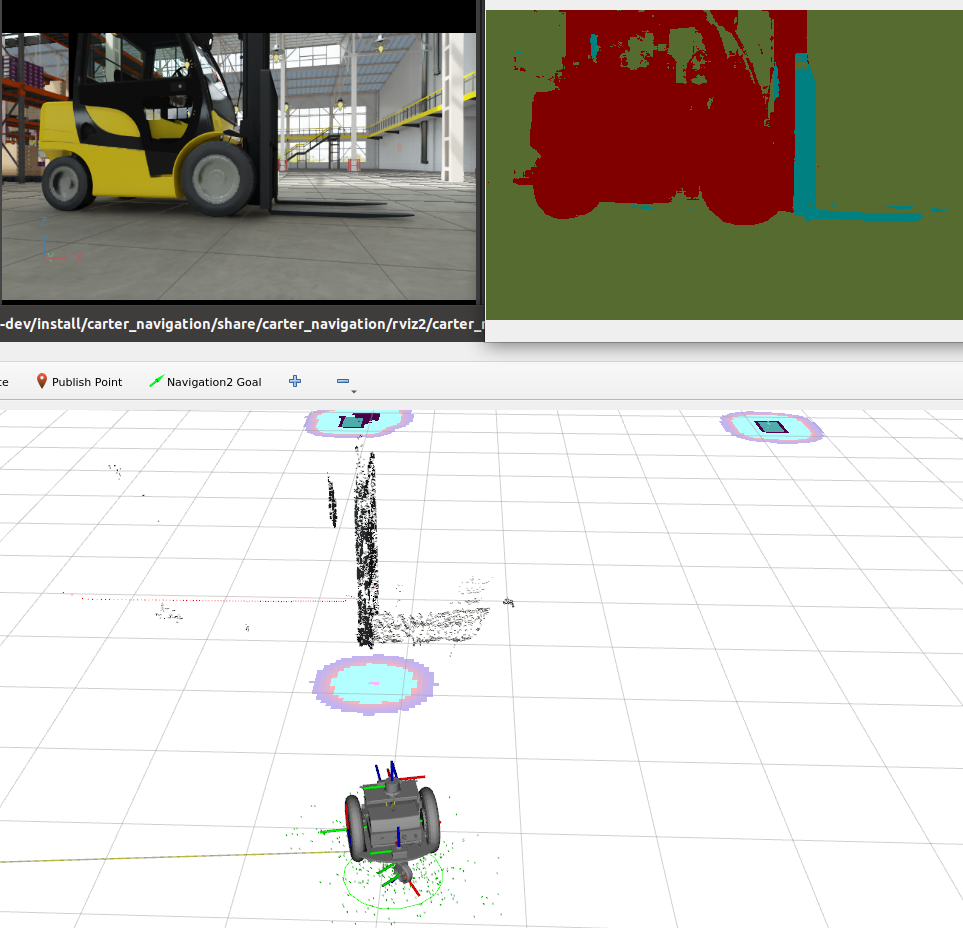
Figure 6. Colored segmentation image generated at 39 FPS by the trained model on images from the robot’s cameras. (top left) The robot’s left camera view. (top right) the segmentation mask; (bottom) the filtered point cloud for forklift tines.
Each pixel in the raw segmentation image represents the class label for the object at that location in the image. Knowing the label of interest, for instance, if 2 represents forklift tines, set the non-interest points to invalid in the corresponding disparity image generated by the Stereo GEM. The point cloud generated as a result does not include these points. This is helpful to reduce noise in the point cloud.
Figure 7. Point cloud generated after disparity filtering
Unlike the point cloud in Figure 4, this only has points belonging to forklift tines.
ROS domain IDs
As the NVIDIA Isaac ROS GEMs run within a container and NVIDIA Isaac Sim runs on the host, you must make sure that ROS topics can be communicated between the host and container.
For this, set the ROS domain ID of all processes to the same number. All ROS2 nodes using the same domain ID can communicate; those using different domain IDs cannot. For more information, see The ROS_DOMAIN_ID.
Notes
The workflow explained in this project avoids obstacles that can be detected by lidar and cameras. For obstacles that are too small or occluded, explore other sensors.
The approach is sensitive to disparity calculation and the quality of point cloud produced as a result. As calculating disparity is a challenging task, it is possible to get noisy point clouds that cause Nav2 to update the costmap incorrectly.
Disparity filtering is dependent on the performance of the segmentation model. A model that cannot produce accurate segmentation masks results in poorly filtered disparity and point clouds.
Here’s how to build efficient multi-camera pipelines taking advantage of the hardware accelerators on NVIDIA Jetson platform in just a few lines of Python.
Multi-camera applications are becoming increasingly popular; they are essential for enabling autonomous robots, intelligent video analytics (IVA), and AR/VR applications. Regardless of the specific use case, there are common tasks that must always be implemented:
Capture
Preprocessing
Encoding
Display
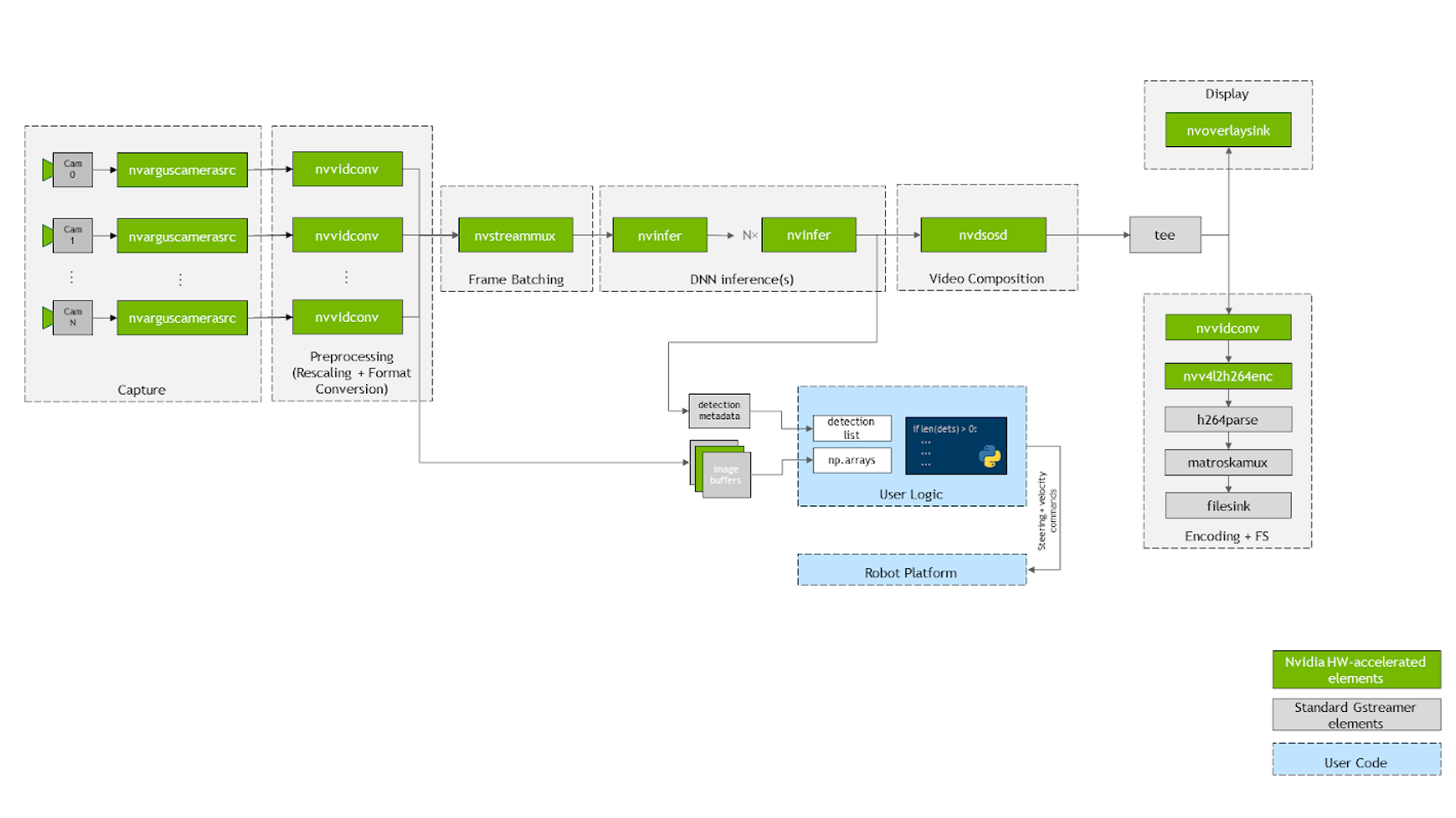
In many cases, you also want to deploy a DNN on the camera streams and run custom logic on the detections. Figure 1 shows the general flow of the application.
Figure 1. Flow of the pipeline implemented in this project
In this post, I showcase how to realize these common tasks efficiently on NVIDIA Jetson platform. Specifically, I present jetmulticam, an easy-to-use Python package for creating multi-camera pipelines. I demonstrate a specific use case on a robot with a surround camera system. Finally, I add custom logic (person following) based on the DNN object detections to obtain the results shown in the following video:
Video 1. Demo showing 3 independent cameras with ~270° field of view. Red Boxes correspond to DashCamNet detections, green ones to PeopleNet. The PeopleNet detections are used to perform person-following logic.
Multi-camera hardware
There are many parameters to consider when choosing a camera: resolution, frame rate, optics, global/rolling shutter, interface, pixel size, and so on. For more information about compatible cameras from NVIDIA partners, see the comprehensive list.
In this specific multi-camera setup, you use the following hardware:
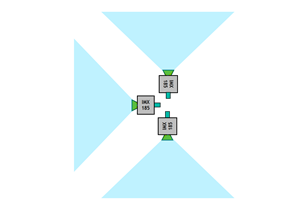
The IMX185 cameras each have a field of view of approximately 90°. Mount them orthogonally to one another for a total FOV of 270°, as shown in Figure 2.
Figure 2. Cameras are mounted to maximize the horizontal FOV
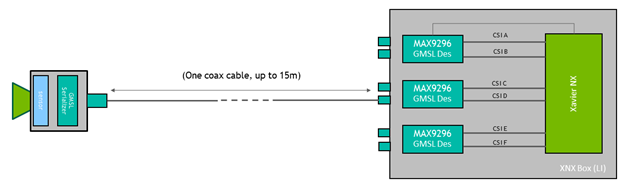
The cameras use the GMSL interface, which offers a lot of flexibility in positioning the cameras even meters away from the Jetson module. In this case, you can raise the cameras by ~0.5m to achieve a greater vertical FOV.
Figure 3. The GMSL interface enables the flexibility to position cameras away from the Jetson module
Getting started with Jetmulticam
First, download and install the NVIDIA Jetpack SDK on your Jetson board. Then, install the jetmulticam package:
After the setup, you can create a basic pipeline using the CameraPipeline class. Pass a list of cameras to include in the pipeline with the initializer argument. In the following example, the elements [0, 1, 2] correspond to device nodes /dev/video0, /dev/video1, and /dev/video2.
from jetmulticam import CameraPipeline
p = CameraPipeline([0, 1, 2])
And that’s it—the pipeline has been initialized and started. You can now read images from each camera in the pipeline and access them as numpy arrays.
img0 = p.read(0) # img0 is a np.array img1 = p.read(1) img2 = p.read(2)
Often, it is convenient to read from the camera in a loop, as in the following code example. The pipeline runs asynchronously from the main thread and read always gets the most recent buffer.
Now you can build a more complex pipeline. This time, use the CameraPipelineDNN class to compose a more complex pipeline, as well as two pretrained models from the NGC catalog: PeopleNet and DashCamNet.
import time from jetmulticam import CameraPipelineDNN from jetmulticam.models import PeopleNet, DashCamNet
while pipeline.running(): arr = pipeline.images[0] # np.array with shape (1080, 1920, 3) dets = pipeline.detections[0] # Detections from the DNNs time.sleep(1/30)
Here’s the breakdown of the pipeline initialization:
Cameras
Models
Hardware acceleration
Saving video
Displaying video
Main loop
Cameras
Firstly, similarly to the previous example, the cameras argument is a list of sensors. In this case, you use cameras associated with device nodes:
/dev/video2
/dev/video5
/dev/video8
cameras=[2, 5, 8]
Models
The second argument, models, enables you to define pretrained models to run in the pipeline.
The models run in real time using NVIDIA Deep Learning Accelerator (DLA). Specifically, you deploy PeopleNet on DLA0 (DLA Core 0) and DashCamNet on DLA1.
Distributing models between two accelerators helps increase the total throughput of the pipeline. Furthermore, DLA is even more power-efficient than GPU. As a result, the system consumes as little as ~10W under full load with the highest clock settings. Finally, in this configuration, the Jetson GPU remains free to accelerate more tasks with the 384 CUDA cores available on Jetson NX.
The following code example shows the list of currently supported model/accelerator combinations.
As a final initialization step, configure the pipeline to display the video output on the screen for debugging purposes.
display=True
Main loop
Lastly, define the main loop. During runtime, the images are available under pipeline.images, and detection results under pipeline.detections.
while pipeline.running(): arr = pipeline.images[0] # np.array with shape (1080, 1920, 3) dets = pipeline.detections[0] # Detections from the DNNs time.sleep(1/30)
The following code example shows the resulting detections. For each detection, you get a dictionary containing the following:
Object class
Object position defined as [left, width, top, height] in pixel coordinates
As the last step, you can extend the main loop to build custom logic using the DNN output. Specifically, you use the detection outputs from your cameras to implement basic person-following logic in the robot. The source code is available in the NVIDIA-AI-IOT/jetson-multicamera-pipelines GitHub repo.
To find the human to follow, parse the pipeline.detections output. This logic is implemented in the find_closest_human function.
Calculate the robot’s steering angle based on where the bounding box is located in dets2steer.
If the human is in the left image, turn maximally left.
If the human is in right image, turn maximally right.
If the human is in the center image, turn proportionately to the X coordinate of the center of the bounding box.
The resulting video is saved to /home/nx/logs/videos, as you defined it during initialization.
Solution overview
Here’s a brief look at how jetmulticam works. The package dynamically creates and launches a GStreamer pipeline with the number of cameras that your application requires. Figure 4 shows how the underlying GStreamer pipeline looks when configured as in the person-following example. As you can see, all critical operations in the system, represented by green boxes, benefit from hardware acceleration.
Figure 4. Internal components of the jetmulticam package
First, the video is captured using multiple CSI cameras, using nvarguscamerasrc elements on the diagram. Each individual buffer is rescaled and converted to RGBA format with either nvvidconv or nvvideoconvert. Next, the frames are batched using the component provided by the DeepStream SDK. By default, the batch size is equal to the number of cameras in the system.
To deploy the DNN models, take advantage of the nvinfer elements. In the demo, I deployed two models, PeopleNet and DashCamNet, on two different accelerators, DLA core 1 and DLA core 2, both available on the Jetson Xavier NX. However, it is possible to stack even more models on top of each other, if needed.
After the resulting bounding boxes are overlaid by the nvosd element, you then display them on an HDMI display, using nvoverlaysink, as well as encoding the video stream with the hardware-accelerated H264 encoder. Save to a .mkv file.
The images available in the Python code (for example, pipeline.images[0]) are parsed to numpy arrays by a callback function, or probe, registered on each of the video converter elements. Similarly, another callback function is registered on the sinkpad of the last nvinfer element that parses the metadata into a user-friendly list of detections. For more information about the source code or individual component configuration, see the create_pipeline function.
Conclusion
The hardware acceleration available on the NVIDIA Jetson platform combined with NVIDIA SDKs enables you to achieve outstanding real-time performance. For example, the person-following example runs two object-detection neural networks in real time on three camera streams, all while maintaining CPU utilization under 20%.
The Jetmulticam package, showcased in this post, enables you to build your own hardware-accelerated pipelines in Python, and to include custom logic on top of the detections.
Read on step by step guide how hierarchical risk parity can used used in portfolio optimization to manage risk.
Data scientists often use the finance world as a playground for testing new techniques. Financial data has been recorded for decades, and it all takes on a numerical form, making it easy to process. Plus, there is always the chance that you create a model that makes money!
Within finance, the general goal of an investment is to maximize return (money made or lost on investment) while minimizing risk (the chance that the actual outcome differs from the predicted outcome). In short, investing money is all about the math.
This post introduces a portfolio optimization strategy that can help minimize exposure to risk. With access to a GPU, the algorithm can be sped-up by a factor up to 66x.
For retail investors, this speedup can be especially useful for frequent rebalances. Meanwhile, institutional investors can use this algorithm to manage money through a robo-advisor. Recalculating the algorithm for each unique customer’s portfolio can be computationally expensive, which can be greatly reduced by introducing a GPU.
In this post, I walk through a step-by-step guide introducing ML techniques for efficient portfolio allocation using hierarchical risk parity (HRP). This example uses Python with RAPIDS.
Choosing an algorithm for efficient financial predictions
In 1952, Harry Markowitz introduced a portfolio-optimization model known as the Modern Portfolio Theory. This model can generate a portfolio of investments that maximizes return for some given amount of risk.
Figure 1. Markowitz’s efficient frontier. Every portfolio lies in the blue area and aims to lie on the efficient frontier.
Unfortunately, the story does not end here. Markowitz’s Modern Portfolio Theory can only produce the most efficient portfolio if you know the risk and return of every equity to pick from. However, this does not always happen, because past performance is not indicative of future results.
For example, Verizon stock is highly correlated with AT&T. Therefore, Verizon competes for representation only against stocks like AT&T instead of against all equities in every sector.
Step-by-step guide to portfolio allocation with HRP
For the rest of this post, I focused on implementing HRP on RAPIDS and then comparing its performance to other common techniques.
Acquire data
In this post, I used daily adjusted close data from every security in the NASDAQ and NYSE over the period November 2018 to November 2021. This dataset was obtained through scripts from the NVIDIA/fsi-samples GitHub repo
For hardware, I used an i7 CPU with an NVIDIA Quadro 8000 GPU. For software, I used Python 3.9 with RAPIDS 22.02.
Wrangle data
Begin by reading in the datasets and aggregating them into a dataframe called m. Drop any equities with null values.
import cudf
m1 = cudf.read_csv("MVO3.2021.11/NASDAQ/prices.csv")
m2 = cudf.read_csv("MVO3.2021.11/NYSE/prices.csv")
m = cudf.concat([m1, m2], axis = 1)
m = m.dropna(axis = 1)
Some of the securities behave poorly: some stay flat for years, others contain non-positive values. Remove these bad securities.
data = m.values # data.shape = (days, nAssets)
days = data.shape[0]
logRetAll = cp.log(data[1:, :]/data[:-1, :])
moveMask = cp.count_nonzero(logRetAll, axis = 0) > (days * 0.9) # Require that each security moves day to day at least 90% of the time
positiveMask = data.min(axis = 0) > 0 # Require that all the data is positive
mask = moveMask & positiveMask
data = data[:, mask]
logRetAll = logRetAll[:, mask]
Next, split m into two parts: a training and testing period. The training period is from November 2018 to November 2020, while the testing occurs from November 2020 to November 2021.
As a result, you obtain the correlation and covariance matrices using built-in cuDF methods after creating a log returns matrix for the training data, as opposed to time series data.
To cluster equities together, define a metric that gives the distance between two equities:
As correlation has a range of [-1, 1], you see that has the range [0, 1] where implies that and are perfectly correlated, and if , then and are perfectly uncorrelated.
Now that you can calculate the distance between two equities, cluster them so that like equities are clustered together.
Each item is placed in its own cluster, and the two closest clusters are joined together. Then, recalculate the distance between this new cluster and all other clusters. Again, you combine the two closest clusters together. This process is repeated until there is only one cluster. One way to visualize this clustering is with a dendrogram.
from scipy.cluster.hierarchy import linkage, dendrogram
dendrogram(linkage(D[:10, :10].get()));
Figure 2. Dendrogram of the clustering of the first ten securities in D. The clustering algorithm is agglomerative clustering, or bottom-up clustering.
cuML has a built-in method to perform this function, which is used in the following code example. This is much faster than the linkage function from scipy, which performs similar functionality.
from cuml import AgglomerativeClustering as AC
# Create single linkage cluster using the Euclidean metric
def cluster(D):
model=AC(affinity='l2', connectivity='pairwise', linkage='single')
model.fit(D);
return model.children_
cluster() outputs a 2 x N matrix where N is the number of equities in . The indices [0, i] and [1, i] represent the indices of the clusters joined for the i-th iteration.
Use matrix seriation
Next, produce an ordering from this clustering, which places like securities near each other. For example, the x-axis of Figure 2 provides an ordering of the first 10 stocks based on their clustering. This is done using an iterative implementation of matrix seriation, which is a common technique frequently used in archaeology.
def seriation(Z):
N = Z.shape[1]
stack = [2*N-2]
res_order = []
while(len(stack) != 0):
cur_idx = stack.pop()
if cur_idx
Figure 3 shows the resulting correlation matrices.
Figure 3. Heatmaps showing the correlation matrices before and after applying matrix seriation.
In Figure 3, you can observe patterns that emerge within the matrix when you apply your ordering to the correlation matrix. This indicates that similar equities are close to each other.
Assign weights
Finally, assign weights to the stocks. This is done through a recursive algorithm.
Split the sorted covariance matrix in half, calculating an adjusted amount of risk for each half, and then assigning weights to each half based on inverse variance portfolio (IVP) methodology. These steps are then repeated for each half.
IVP results in weights that are inversely proportional to the amount of risk, or variance, of the stock. That is, a high risk stock has low representation while a low risk stock has high representation.
Both HRP and IVP are risk-parity algorithms: they only take risk into account based on past performance.
def recursiveBisection(V, l, r, W):
#Performs recursive bisection weighting for a new portfolio
#V is the sorted correlation matrix
#l is the left index of the recursion
#r is the right index of the recursion
#W is the list of weights
if r-l == 1: #One item
return W
else:
#Split up V matrix
mid = l+(r-l)//2
V1 = V[l:mid, l:mid]
V2 = V[mid:r, mid:r]
#Find new adjusted V
V1_diag_inv = 1/cp.diag(V1)
V2_diag_inv = 1/cp.diag(V2)
w1 = V1_diag_inv/V1_diag_inv.sum()
w2 = V2_diag_inv/V2_diag_inv.sum()
V1_adj = w1.T@V1@w1
V2_adj = w2.T@V2@w2
#Adjust weights
a2 = V1_adj/(V1_adj+V2_adj)
a1 = 1-a2
W[l:mid] = W[l:mid]*a1
W[mid:r] = W[mid:r]*a2
W = recursiveBisection(V, l, mid, W)
W = recursiveBisection(V, mid, r, W)
return W
Analyze weights
You now have all of the tools necessary to perform HRP. See how it performs!
#Obtain the final weights and plot them
N = len(res_order)
V = covTrain[res_order, :][:, res_order]
W_tmp = recursiveBisection(V, 0, N, cp.ones(N))
W = cp.empty(len(W_tmp))
W[res_order] = W_tmp
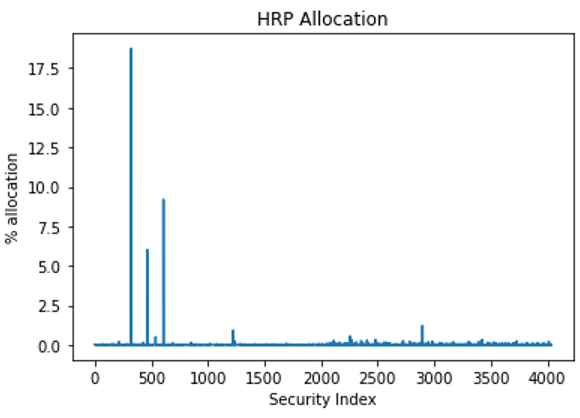
plt.plot(W.get())
plt.xlabel("Security Index")
plt.ylabel("% allocation")
plt.title("HRP Allocation")
plt.plot();
After applying the listed methods, you end up with a variable W that represents the weighting of each security.
Figure 4 displays the results.
Figure 4. Percent allocation for each security according to HRP methodology
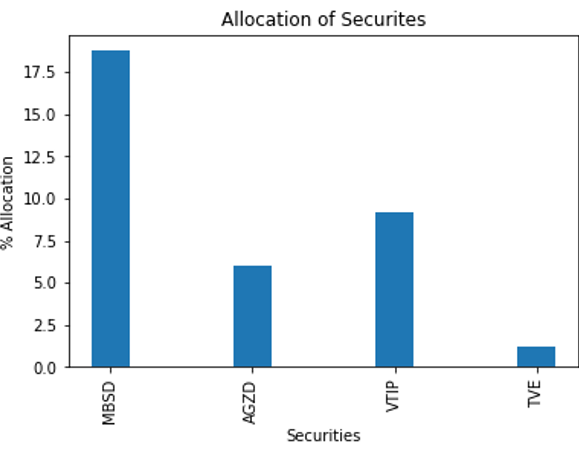
This graph is difficult to read. You can truncate it so that only securities with a weight greater than 1% are shown (Figure 5).
Figure 5. HRP final weights for securities that have a greater than 1% representation
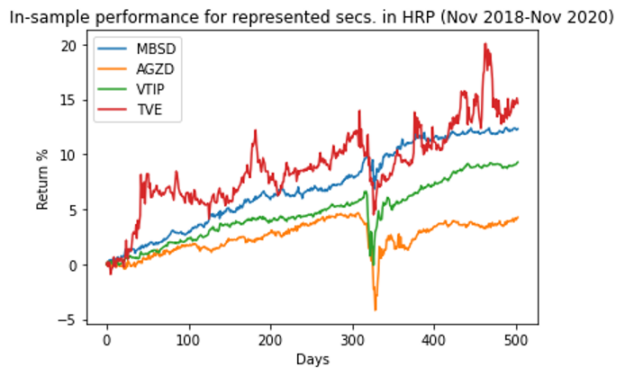
As a sanity check, Figure 6 shows how the top picks performed over the training period. You are looking to make sure that the securities have a relatively low volatility.
Figure 6. Performance of top HRP stocks during training period (Nov 2018 – Nov 2020)
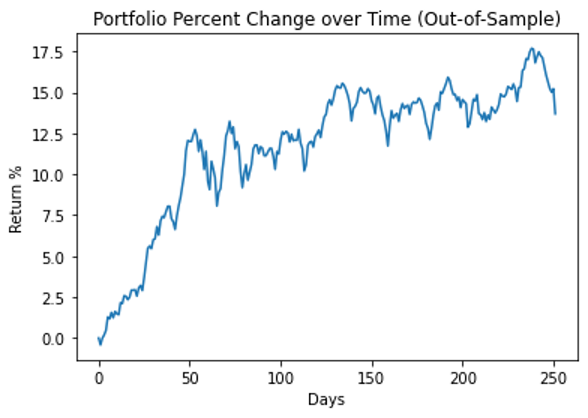
Figure 7 displays the performance of the entire portfolio over the testing period.
Figure 7. Performance of the HRP portfolio during the testing period (Nov 2020 – Nov 2021)
Compare against other portfolios
You can compare this performance to that of Modern Portfolio Theory. For this iteration, I chose to maximize the Sharpe ratio: a metric to track the performance of a portfolio.
In this formula, is the risk-free rate of return. In the finance world, risk is defined as where is the covariance matrix. This way, both the risk and return of a portfolio are folded into the metric.
Use scipy to perform numerical optimization.
from scipy.optimize import *
from scipy.optimize import *
def MPT(cov, R):
cons = [{'type': 'eq', 'fun': lambda x: sum(x) - 1}, #sum(w)==1",
{'type': 'ineq', 'fun': lambda x: x}] #each weight >=0 (no short selling)"
res = minimize(lambda x: -(x@R-1.025)/sqrt(x.T@cov@x), x0=np.ones(len(R))/len(R), constraints=cons) #Minimize risk"
return res.x
This is a complex numerical optimization problem, especially considering that you have over 4,000 assets. Shrink this to 278 securities by requiring that each must have a Sharpe ratio greater than 1. This cutoff is arbitrary, but masking is recommended to reduce runtime.
W_MPT = cp.zeros(nAssets)
sharpeTrain = (trainRetAll - 1.025) / (cp.std(logRetTrain, axis = 0) * math.sqrt(252)) # Annualized sharpe
covnp = covTrain[sharpeTrain > 1, :][:, sharpeTrain > 1].get() # Numpy version of covariance matrix over training period, masked
Rnp = trainRetAll[sharpeTrain > 1].get() # Return of all stocks over the training period, masked, in numpy
W_MPT[sharpeTrain > 1] = MPT(covnp, Rnp, 1+i/100)
You can also generate weights for the inverse variance portfolio.
Lastly, generate some random portfolios, which choose 15 different securities, and allocate a random amount to each one. This simulates a portfolio that an uninformed retail investor might choose.
Figure 8 shows the outcomes of all portfolios.
Figure 8. Return vs. risk for the different portfolios over the training (left) and testing period (right)
For the preceding portfolios, you generate the Sharpe ratios in the following table.
Train (Nov 2018 – Nov 2020)
Test (Nov 2020 – Nov 2021)
Median of Random Portfolios
0.01
0.97
HRP
0.91
1.51
IVP
0.35
1.83
MPT
7.51
-0.18
Table 1. Sharpe ratios for four different portfolios over the training (left) and testing (right) period
While MPT has a high Sharpe ratio during the training sample, it turns negative during the training period, implying that the portfolio underperforms the risk-free rate of 2.5%. This demonstrates what is known as Markowitz’s curse: While it performs optimally in-sample, it oftentimes falls flat out-of-sample.
Further, while IVP has a higher Sharpe ratio than MPT over the testing period, remember that both of these methodologies are risk-parity portfolios. They aim to minimize risk and do not take return into account. It may be more pertinent to notice that over the testing period HRP has a 5.5% risk, while IVP has a 9.4% risk.
Analyze speed
One other thing to analyze is the runtime compared to a CPU. You can re-create the algorithm by using libraries such as SciPy, pandas, or NumPy instead of RAPIDS.
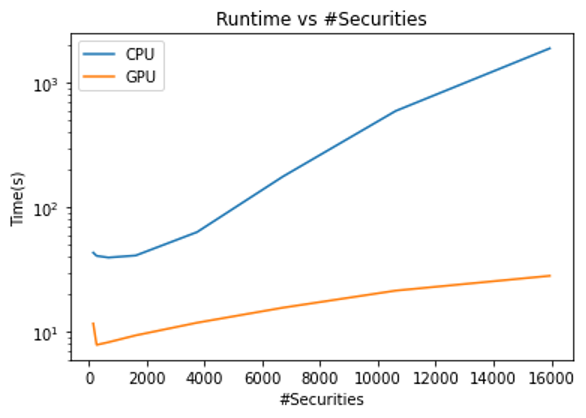
As the number of securities that you analyze increases, the amount of computing power required increases. This also increases the capability for parallelization, which can be captured by a GPU.
Figure 10. Log time vs. the number of securities for performing HRP on a GPU and CPU. The algorithm was run on mutual funds to give a larger pool of securities to run HRP on.
For the maximum number of securities, you achieve a speedup of 66x by running on a GPU over a CPU! Even in the worst case, you still obtain a 4x speedup.
Key learnings on HRP
Even though HRP was initially created to demonstrate how machine learning can be used in portfolio optimization, it has been shown to result possibly in less risk when compared to inverse variance and a higher Sharpe ratio than modern portfolio theory. López de Prado further backs this up in his Building Diversified Portfolios that Outperform Out of Sample paper, demonstrating lower drawdowns and variance for synthetic data.
Investors may turn to HRP when looking for ways to manage risk or to combine with other financial techniques to reduce risk for some requested rate of return.
With help from the GPU speedup that RAPIDS provides, HRP can be a viable portfolio optimization tool for a comparatively low computation cost.
The latest release features Omniverse integration for interactive visualization, new AI architectures to accelerate the scientific simulations using data, and more.
From physics-informed neural networks (PINNs) to neural operators, developers have long sought after the ability to build real-time digital twins with true-to-form rendering, robust visualizations and synchronization with the physical system in the real world by streaming live sensor data. Latest release of Modulus brings us closer to this reality.
Modulus 22.03, the cutting-edge framework for developing physics-based machine learning models, offers developers key capabilities such as novel physics informed and data driven AI architectures, and integration into the Omniverse (OV) platform.
This release takes a major step toward building precise simulations and interactive visualization capabilities for engineers and researchers with the Modulus OV extension. This enhancement is bolstered by new AI architectures that can learn from data using neural operators. Additional enhancements to facilitate precise modeling of problems such as turbulence have been added in this latest version of Modulus, as well as features to improve training convergence.
With the OV integration, training and inference workflows are Python API-based and the resulting trained model outputs are brought in as scenarios into OV using this extension.
This extension can import outputs of the Modulus-trained model into a visualization pipeline for common scenarios such as streamlines and iso-surfaces. It also provides an interface that enables interactive exploration of design variables and parameters to infer new system behavior. By leveraging this extension in Omniverse, you can visualize the simulation behavior in the context of the digital twin.
New network architectures
Modulus now supports neural operators such as FNO, AFNO PINO and DeepONet architectures. This enables data-driven physics machine learning models for use cases where there is considerable ground truth data available to train from.
FNO: Physics-inspired neural network model that uses global convolutions in spectral space as an inductive bias for training neural network models of physical systems. It incorporates important spatial and temporal correlations, which strongly govern the dynamics of many physical systems that obey partial differentiation equation (PDE) laws.
AFNO: An adaptive FNO for scaling self-attention to high-resolution images in vision transformers by establishing a link between operator learning and token mixing. AFNO is based on FNO that allows framing token mixing as a continuous global convolution without any dependence on the input resolution. The resulting model is highly parallel with a quasi-linear complexity and has linear memory in the sequence size.
PINO: PINO is the explicitly physics-informed version of the FNO. PINO combines the operating-learning and function-optimization frameworks. In the operator-learning phase, PINO learns the solution operator over multiple instances of the parametric PDE family. In the test-time optimization phase, PINO optimizes the pretrained operator ansatz for the querying instance of the PDE. Learn more in this PINO tutorial.
DeepONet: DeepONet architecture consists of two subnetworks, one for encoding the input function and another for encoding the locations and then merged to compute the output. DeepONets are shown to reduce the generalization error, by employing inductive bias, compared to the fully connected networks. Learn more in this DeepONet Tutorial.
Modulus supports these different architectures to enable our ecosystem of users to pick the right approach that is appropriate for their use case.
More key enhancements
Two-equation (2-eqn.) Turbulence models: Support for 2-equation turbulence (k-e and k-w) models for simulating fully developed turbulent flow. Reference applications for channel case (1D and 2D) using wall functions is included in the documentation. Which showcases two types of wall functions (standard and Launder-Spalding). Learn more in this 2-eqn tutorial.
New algorithms for loss balancing: To help improve the convergence,three new loss balancing algorithms, namely Grad Norm, Relative Loss Balancing with Random Lookback (ReLoBRaLo), and Soft Adapt have been introduced. These algorithms dynamically tune the loss weights based on the relative training rates of different losses.
In addition, Neural Tangent Kernel (NTK) analysis has been incorporated. NTK is a neural network analysis tool that indicates the convergent speed of each component. It will provide an explainable choice for the weights for different loss terms. Grouping the mean-squared error of the loss allows computation of NTK on the fly.
Support for new optimizers: Modulus now supports over 30 optimizers including the built-in PyTorch optimizers and the optimizers in the torch-optimizer library. Includes support for AdaHessian, a second-order stochastic optimizer that approximates an exponential moving average of the Hessian diagonal for adaptive preconditioning of the gradient vector.
NVIDIA Modulus is available now as a free download via the NVIDIA Developer Zone.
I have a tensorflow 1.x model that I would like to modify, I want to duplicate any one of the nodes (i.e. h_conv4 at line 43) of the model and force it to have the same weights as the original one while keeping both nodes in the model, does anyone know if it is possible and how could I do it? Otherwise could I duplicate it after the training phase? Thanks!
Posted by Zifeng Wang, Student Researcher, and Zizhao Zhang, Software Engineer, Google Research
Supervised learning is a common approach to machine learning (ML) in which the model is trained using data that is labeled appropriately for the task at hand. Ordinary supervised learning trains on independent and identically distributed (IID) data, where all training examples are sampled from a fixed set of classes, and the model has access to these examples throughout the entire training phase. In contrast, continual learning tackles the problem of training a single model on changing data distributions where different classification tasks are presented sequentially. This is particularly important, for example, to enable autonomous agents to process and interpret continuous streams of information in real-world scenarios.
To illustrate the difference between supervised and continual learning, consider two tasks: (1) classify cats vs. dogs and (2) classify pandas vs. koalas. In supervised learning, which uses IID, the model is given training data from both tasks and treats it as a single 4-class classification problem. However, in continual learning, these two tasks arrive sequentially, and the model only has access to the training data of the current task. As a result, such models tend to suffer from performance degradation on the previous tasks, a phenomenon called catastrophic forgetting.
Mainstream solutions try to address catastrophic forgetting by buffering past data in a “rehearsal buffer” and mixing it with current data to train the model. However, the performance of these solutions depends heavily on the size of the buffer and, in some cases, may not be possible at all due to data privacy concerns. Another branch of work designs task-specific components to avoid interference between tasks. But these methods often assume that the task at test time is known, which is not always true, and they require a large number of parameters. The limitations of these approaches raise critical questions for continual learning: (1) Is it possible to have a more effective and compact memory system that goes beyond buffering past data? (2) Can one automatically select relevant knowledge components for an arbitrary sample without knowing its task identity?
In “Learning to Prompt for Continual Learning”, presented at CVPR2022, we attempt to answer these questions. Drawing inspiration from promptingtechniques in natural language processing, we propose a novel continual learning framework called Learning to Prompt (L2P). Instead of continually re-learning all the model weights for each sequential task, we instead provide learnable task-relevant “instructions” (i.e., prompts) to guide pre-trained backbone models through sequential training via a pool of learnable prompt parameters. L2P is applicable to various challenging continual learning settings and outperforms previous state-of-the-art methods consistently on all benchmarks. It achieves competitive results against rehearsal-based methods while also being more memory efficient. Most importantly, L2P is the first to introduce the idea of prompting in the field of continual learning.
Compared with typical methods that adapt entire or partial model weights to tasks sequentially using a rehearsal buffer, L2P uses a single frozen backbone model and learns a prompt pool to conditionally instruct the model. “Model 0” indicates that the backbone model is fixed at the beginning.
<!–
Compared with typical methods that adapt entire or partial model weights to tasks sequentially using a rehearsal buffer, L2P uses a single frozen backbone model and learns a prompt pool to conditionally instruct the model. “Model 0” indicates that the backbone model is fixed at the beginning.
–>
Prompt Pool and Instance-Wise Query Given a pre-trained Transformer model, “prompt-based learning” modifies the original input using a fixed template. Imagine a sentiment analysis task is given the input “I like this cat”. A prompt-based method will transform the input to “I like this cat. It looks X”, where the “X” is an empty slot to be predicted (e.g., “nice”, “cute”, etc.) and “It looks X” is the so-called prompt. By adding prompts to the input, one can condition the pre-trained models to solve many downstream tasks. While designing fixed prompts requires prior knowledge along with trial and error, prompt tuning prepends a set of learnable prompts to the input embedding to instruct the pre-trained backbone to learn a single downstream task, under the transfer learning setting.
In the continual learning scenario, L2P maintains a learnable prompt pool, where prompts can be flexibly grouped as subsets to work jointly. Specifically, each prompt is associated with a key that is learned by reducing the cosine similarity loss between matched input query features. These keys are then utilized by a query function to dynamically look up a subset of task-relevant prompts based on the input features. At test time, inputs are mapped by the query function to the top-N closest keys in the prompt pool, and the associated prompt embeddings are then fed to the rest of the model to generate the output prediction. At training, we optimize the prompt pool and the classification head via the cross-entropy loss.
Illustration of L2P at test time. First, L2P selects a subset of prompts from a key-value paired prompt pool based on our proposed instance-wise query mechanism. Then, L2P prepends the selected prompts to the input tokens. Finally, L2P feeds the extended tokens to the model for prediction.
Intuitively, similar input examples tend to choose similar sets of prompts and vice versa. Thus, prompts that are frequently shared encode more generic knowledge while other prompts encode more task-specific knowledge. Moreover, prompts store high-level instructions and keep lower-level pre-trained representations frozen, thus catastrophic forgetting is mitigated even without the necessity of a rehearsal buffer. The instance-wise query mechanism removes the necessity of knowing the task identity or boundaries, enabling this approach to address the under-investigated challenge of task-agnostic continual learning.
Effectiveness of L2P We evaluate the effectiveness of L2P in different baseline methods using an ImageNet pre-trained Vision Transformer (ViT) on representative benchmarks. The naïve baseline, called Sequential in the graphs below, refers to training a single model sequentially on all tasks. The EWC model adds a regularization term to mitigate forgetting and the Rehearsalmodel saves past examples to a buffer for mixed training with current data. To measure the overall continual learning performance, we measure both the accuracy and the average difference between the best accuracy achieved during training and the final accuracy for all tasks (except the last task), which we call forgetting. We find that L2P outperforms the Sequential and EWC methods significantly in both metrics. Notably, L2P even surpasses the Rehearsal approach, which uses an additional buffer to save past data. Because the L2P approach is orthogonal to Rehearsal, its performance could be further improved if it, too, used a rehearsal buffer.
L2P outperforms baseline methods in both accuracy (top) and forgetting (bottom). Accuracy refers to the average accuracy for all tasks and forgetting is defined as the average difference between the best accuracy achieved during training and the final accuracy for all tasks (except the last task).
We also visualize the prompt selection result from our instance-wise query strategy on two different benchmarks, where one has similar tasks and the other has varied tasks. The results indicate that L2P promotes more knowledge sharing between similar tasks by having more shared prompts, and less knowledge sharing between varied tasks by having more task-specific prompts.
Prompt selection histograms for benchmarks of similar tasks (left) and varied tasks (right). The left benchmark has higher intra-task similarity, thus sharing prompts between tasks results in good performance, while the right benchmark favors more task-specific prompts.
Conclusion In this work, we present L2P to address key challenges in continual learning from a new perspective. L2P does not require a rehearsal buffer or known task identity at test time to achieve high performance. Further, it can handle various complex continual learning scenarios, including the challenging task-agnostic setting. Because large-scale pre-trained models are widely used in the machine learning community for their robust performance on real-world problems, we believe that L2P opens a new learning paradigm towards practical continual learning applications.
Acknowledgements We gratefully acknowledge the contributions of other co-authors, including Chen-Yu Lee, Han Zhang, Ruoxi Sun, Xiaoqi Ren, Guolong Su, Vincent Perot, Jennifer Dy, Tomas Pfister. We would also like to thank Chun-Liang Li, Jeremy Martin Kubica, Sayna Ebrahimi, Stratis Ioannidis, Nan Hua, and Emmanouil Koukoumidis, for their valuable discussions and feedback, and Tom Small for figure creation.

 3D Artist Daniel Martinger discusses how he captured the attention of the computer graphics world with a path-traced rendered scene using an NVIDIA RTX 3090 and Unreal Engine 5.
3D Artist Daniel Martinger discusses how he captured the attention of the computer graphics world with a path-traced rendered scene using an NVIDIA RTX 3090 and Unreal Engine 5.
 -")
![[Discussion] Training performance evaluation of MindSpore, a home-grown deep learning framework -- by ADSL Lab, CSU](https://b.thumbs.redditmedia.com/rTgUoc6iY7bYkQwi68EA3HYlQ8tdH4QRf0Rp7H-Eedk.jpg "[Discussion] Training performance evaluation of MindSpore, a home-grown deep learning framework -- by ADSL Lab, CSU")
 I show how NVIDIA Isaac Sim and NVIDIA Isaac ROS GEMs can be used with the Nav2 navigation stack for robotic navigation.
I show how NVIDIA Isaac Sim and NVIDIA Isaac ROS GEMs can be used with the Nav2 navigation stack for robotic navigation. 


 Here’s how to build efficient multi-camera pipelines taking advantage of the hardware accelerators on NVIDIA Jetson platform in just a few lines of Python.
Here’s how to build efficient multi-camera pipelines taking advantage of the hardware accelerators on NVIDIA Jetson platform in just a few lines of Python.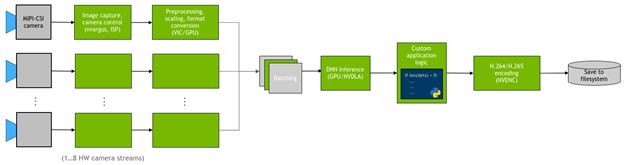
 Read on step by step guide how hierarchical risk parity can used used in portfolio optimization to manage risk.
Read on step by step guide how hierarchical risk parity can used used in portfolio optimization to manage risk.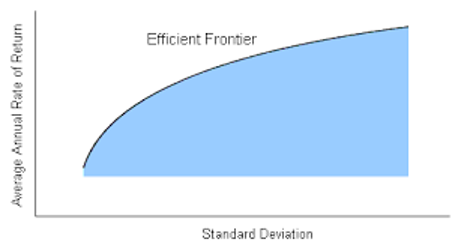
 has the range
has the range  implies that
implies that  and
and  are perfectly correlated, and if
are perfectly correlated, and if  , then
, then 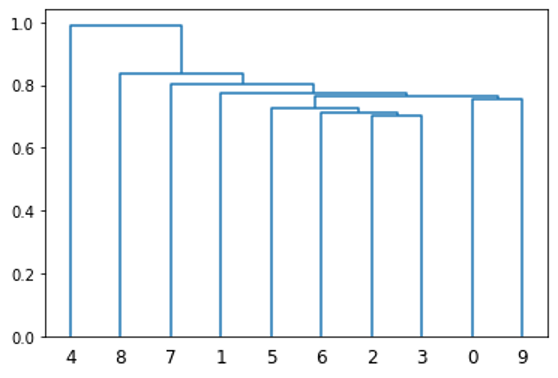


 is the risk-free rate of return. In the finance world, risk is defined as
is the risk-free rate of return. In the finance world, risk is defined as  where
where  is the covariance matrix. This way, both the risk and return of a portfolio are folded into the metric.
is the covariance matrix. This way, both the risk and return of a portfolio are folded into the metric. 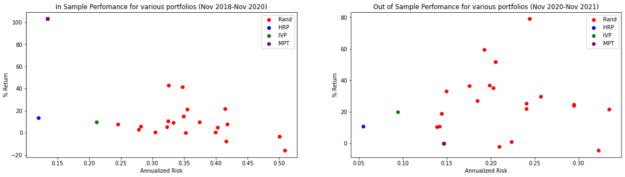
 The latest release features Omniverse integration for interactive visualization, new AI architectures to accelerate the scientific simulations using data, and more.
The latest release features Omniverse integration for interactive visualization, new AI architectures to accelerate the scientific simulations using data, and more.