BlueField-2 offers protection, while delivering high security, integrity, and reliability for the new hybrid cloud era.
Data Processing Units, or DPUs, are the new foundation for a comprehensive and innovative security offering. The hyperscale giants and telecom providers have adopted this strategy for building and securing highly efficient cloud data centers, and it’s now available for enterprise customers. This strategy has revolutionized the approach to minimize risks and enforce security policies inside the data center.
A DPU is an integrated system on a chip (SOC) that combines high-performance CPU, network interface, and data center function accelerators into a single ASIC. DPUs utilize programmable hardware to offload and accelerate inline security services at line-rate.
BlueField DPU
The NVIDIA® BlueField®-2 DPU provides the first line of defense against attacks. Internal attacks that try to infiltrate the data center are prevented through an isolated, secure boot process and secure firmware updates. Aimed at accelerating security throughout the data center, DPUs are capable of filtering packets in support of next-generation firewalls and intrusion detection/prevention systems. A DPU can detect, block, and protect sensitive assets and data from threats.
The design offers built-in functional isolation to protect individual workloads and provide flexible control and visibility at the server level, reducing risk, and increasing efficiency. The isolation enables software agents and applications to run securely on the DPU, irrespective of the rest of the system.
Isolated from the host, and leveraging unique hardware capabilities, the DPU can deliver better security by reducing the attack surface and bolstering individual workload isolation—providing additional protection to reduce risks and simplify security management policies.
Furthermore, DPUs offload and accelerate cryptographic operations and offer encryption of data at rest or in motion. Freeing the host CPU to run critical applications, and being isolated from the application domain, keeps the cryptographic keys secure from a potentially compromised host.
The Changing Role of Firewall Security
The adoption of a cloud compute model calls for intelligent security solutions capable of delivering maximum performance and agility. In the age of hybrid cloud and virtualized computing, security functions have transformed. They are being deployed within every host to provide strict policy enforcement, as well as visibility into possible attacks.
Previously, protection within the host required running a software security solution or VM appliance, which was slow and consumed CPU resources. As new technology and bandwidth requirements increase, host-based protection now requires hardware performance at line-rate.
BlueField-2 DPU can be used as such a device to filter traffic traveling between computers. NVIDIA DPUs employ powerful hardware and software networking components that are programmable, with a configurable set of rules to inspect all traffic traversing the connection at line-rate. When combined with perimeter security solutions, a DPU can extend security to include host-based protection.
The DPU can be used as a platform that sits at the ingress and egress points of each host, adding a new layer where it’s needed most—at the computing edge. Together, they better protect against malicious threats to company assets and resources.
Software-based firewalls also place an additional burden on the CPU, reducing available computing resources for application processing and decreasing the number of VM, applications, and services that can run on a single host. BlueField-2 DPU security platform, with a software security stack, offloads security services from the host, freeing CPU cycles for applications running on host resources.
Micro-Segmentation
The complexity of security increases with the use of computing and network virtualization technologies. Micro-segmentation is a network security technique in virtualized environments that logically divides a data center into distinct individual security segments at the workload level. At this low-level, security controls can be defined, and security services delivered for each unique segment. BlueField-2 provides a platform for hosting micro-segmentation and network connection tracking services for flow-based network analytics and application-level security for traffic inside the data center.
The DPU can run a security software stack, leaving no impact on servers or hindering application performance. This hardware-accelerated solution includes security policies and enforcement capabilities at wire speed and is fully isolated from the application workloads themselves.
The decade-old approach of perimeter security defense has reached a tipping point of performance limitations and operational complexities. A new holistic approach to security is needed for enterprises to achieve robust protection. Enterprise data centers are evolving and following the lead of hyperscale and public cloud providers with CDI and should also adopt their similar tactics for network security. BlueField-2 can offer protection for all types of workloads against current and future threats, and can deliver the highest security, integrity, and reliability for the new hybrid cloud era.
As the cybersecurity landscape grows in complexity, security experts continue to turn to NVIDIA BlueField-2 as a platform to provide advanced security features.
Our security experts are here to help answer questions about how BlueField-2 can augment and expand your security solution. If you’re a security architect or product manager at a cybersecurity company, contact us.
Simulations are pervasive in every domain of science and engineering, but they often have constraints such as large computational times, limited compute resources, tedious manual setup efforts, and the need for technical expertise. Neural networks not only accelerate simulations done by traditional solvers, but also simplify simulation setup and solve problems not addressable by traditional … Continued
Simulations are pervasive in every domain of science and engineering, but they often have constraints such as large computational times, limited compute resources, tedious manual setup efforts, and the need for technical expertise. Neural networks not only accelerate simulations done by traditional solvers, but also simplify simulation setup and solve problems not addressable by traditional solvers.
NVIDIA SimNet is a physics-informed neural network (PINN) toolkit for engineers, scientists, students, and researchers who are getting started with AI-driven physics simulations. You may also be looking to leverage a powerful, existing framework to implement your domain knowledge and solve complex nonlinear physics problems with real-world applications.
A success story of SimNet’s application today is in the use of hybrid PINNs for digital twins in prognosis and health management. This effort was led by Prof. Felipe Viana, an assistant professor at the University of Central Florida. He leads the group’s research in state-of-the-art probabilistic methods fusing physics-based domain knowledge and multidisciplinary analysis and optimization with applications in design, diagnostics, and prognostics.
Aircraft use case study
Maintenance of engineering assets and industrial equipment (such as aircraft, jet engines, wind turbines, and so on) is critical for safety as well as enhanced profitability in the services and warranties of these assets. Effective preventive maintenance requires the knowledge of the various operating parameters and their impact on the wear and tear of equipment. Simulations, advanced analytics, and deep learning algorithms enable the predictive modeling of complex systems and their operating environment.
Unfortunately, building models that estimate residual useful life for such equipment in large fleets is daunting. This is due to factors such as duty cycle variations, harsh environments, inadequate maintenance, and mass production problems that cause discrepancies between designed and observed component lives.
In this research project, Prof. Viana and his team of researchers built predictive models for fatigue crack growth prognosis on aircraft window panels (Figure 1), where models were trained using historical flight records (origin and destination airports, cruise altitude, and so on) and limited inspection observations (such as the crack length data for only a portion of the fleet, and so on). When the model was built and validated, it was then applied in a fleet of 500 aircraft to analyze the success of the model on larger data sets. Such predictive models are also called digital twin models and they have been increasingly used in prognosis and health management applications of industrial equipment.
Figure 1. Fatigue crack growth at fuselage panel
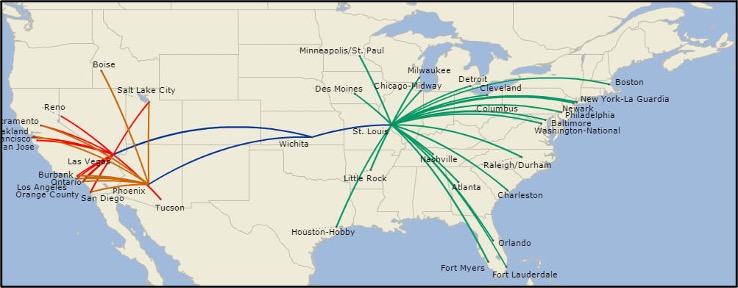
Based on literature and freely available data, synthetic data for a representative fleet of 500 narrow-body aircraft was created. The fleet is equally divided into 10 route structures (Figure 2). Each aircraft flies an average of five flights per day.
Figure 2. Aircraft routes
After four years of operation, the fleet starts being inspected. At this point, consider a case in which after inspecting 25 aircraft, the operator finds that some exhibit fatigue cracks at the corner of a given window. These cracks happen to be larger than anticipated. From a scientific standpoint, this poses the following challenge: if predictions were wrong due to model assumptions, is there a way to correct that?
The business implication is straightforward. When such a discrepancy is observed, operators must decide which aircraft to inspect next.
Assume that you have available the flight data from the fleet for the past four years. The hoop stresses that govern the fatigue crack growth are a function of the aircraft cabin pressure differential, which is a function of cruise altitude. The purely physics-based model assumes the local geometry correction factor F = 1.122. In reality, that is ultimately a function of the crack length. The digital twin for this component must be predictive and aircraft-specific, in addition to being computationally efficient.
There are two main challenges. First, the data is highly unbalanced. For the aircraft fleet that was being analyzed, there were only 182,500 input points and only 25 output points. Building purely machine learning models under such circumstance is extremely hard.
Second, while the conventional physics-based models maybe accurate, they often entail engineering assumptions regarding loading conditions. Considering that the sample size for this problem includes a fleet of 500 aircraft, these simulations must be done a few million times.
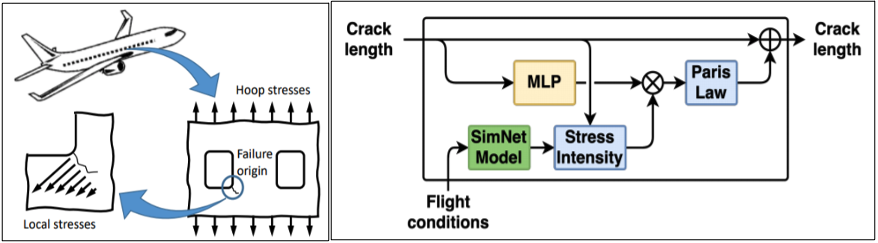
To overcome these challenges, Prof. Viana and team developed a novel hybrid physics-informed neural network model. Figure 3 shows where they performed cumulative damage accumulation based on recurrent neural networks merging physics-informed and data-driven layers.
Figure 3. Physics informed kernels within the recurrent network
Full-fledged finite element analysis configured for crack growth simulation is extremely expensive. Therefore, it is simply not feasible for digital twin applications. This is true even if we were to run simulations for hundreds of aircraft many times over, as we optimized inspections and decided how to swap routes for a few aircraft. A parameterized physics-driven AI model is constructed in SimNet that satisfies the governing laws of linear elasticity, as follows:
Here, is the Cauchy stress tensor, is the Kronecker delta function and is the strain tensor. The inputs to this parameterized model are the loading condition (the hoop stresses) and the spatial coordinates of batches of a point cloud within the computational domain. The outputs are the stresses and displacements. The network architecture consists of a Fourier feature encoding layer followed by several fully connected layers.
Unlike the traditional data-driven models, no training data is used here. Instead, the loss functions are augmented by the linear elasticity laws, and the required second-order derivatives are computed using automatic differentiation. Initial and boundary conditions are also imposed as soft constraints to fully specify the physical system. Several techniques are used to enhance the accuracy and convergence speed of the model, such as network weight normalization, signed distance loss weighting, differential equation normalization and nondimensionalization, and XLA kernel fusion.
After a single training, this parameterized model provides instantaneous prediction of cyclic stresses for a variety of different loading conditions. This instantaneous prediction is critical in digital-twin applications where real-time predictions are needed. However, traditional solvers can only solve for one configuration at a time. Moreover, data-driven, surrogate-based approaches suffer from interpolation error and the predictions may not satisfy the governing laws.
For this trained parameterized model, several SimNet predictions are validated against a commercial solver, showing a close agreement with a difference of less than 5% in the maximum Von Mises stresses. Training of this model was performed on a single V100 GPU. SimNet also offers scalable performance for multi-GPU and multi-node implementation with TF32 support for accelerated convergence.
In Prof. Viana’s model, engineers and scientists can use physics-informed layers to model well-understood phenomena. This might include mechanical stress calculations to estimate the damage accumulation with Paris law fatigue increment block. Another example would be using data-driven layers to model poorly characterized parts such as corrections in stress intensity due to geometry of crack. This is where hybrid models can help estimate fatigue crack growth on fuselage panels with window cutouts.
In Figure 4, the “before training” curve uses purely physics-based models. These are obtained through numerical integration of Paris law using linear elasticity in the calculation of cyclic stresses:
: number of cycles
and : material properties (obtained through coupon tests)
: cyclic stresses (for example, from finite element models)
In Figure 4, the “after training” curve uses the hybrid model where the MLP layer in the RNN cell compensates for missing physics (adjusting predictions without violating the physics).
Figure 4. Predicted compared to actual crack length at inspected aircraft
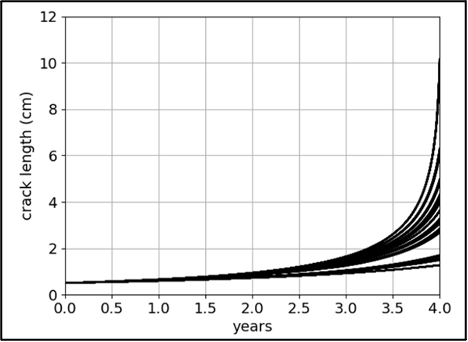
After the hybrid model is trained, we use it to predict crack length histories for the entire fleet of 500 aircraft. The 500 pressure differential time series amount for more than 3.5M data points. The hybrid cumulative damage recurrent neural network, using SimNet for stress calculations, predicts the crack length histories in 5 years. The results are illustrated in Figure 5. This enables the operators to prioritize which aircraft will be brought for inspection or swapping aircraft of different route structures.
Figure 5. Crack length history over the years
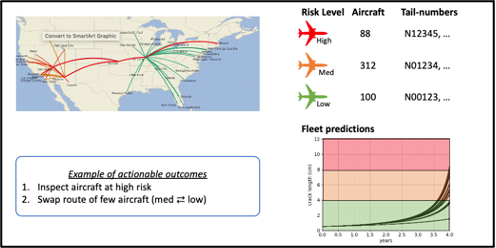
Operators could use the hybrid model to analyze the entire fleet. The results dashboard could visualize the most aggressive route structures in terms of cumulative damage rates; number of aircraft at high, medium, or low risk levels; as well which tail numbers are in which buckets (Figure 6).
Figure 6. Fleet dashboard
In terms of actionable outcomes, operators could use the hybrid model to decide which aircraft should be brought for inspection next. They could swap aircraft between routes so that damage accumulation is mitigated while inspections are performed.
This framework handles highly unbalanced datasets formed by few output observations and data lakes containing time series used as inputs. GPU computing enables scaling up computations for fleets of hundreds of aircraft, keeping training under a few hours and inference under a few seconds.
Prof. Viana’s application’s implementation has been done in TensorFlow v2.3 using the Python APIs on various NVIDIA GPUs. Depending on the application and computing needs, you can use high-performance GPU-based clusters, a smaller Linux server with few GPUs, or even the NVIDIA Jetson. For this study, we used a Linux server with two Intel Xeon Processor E5-2683 and two NVIDIA P100 GPUs.
Next steps
In the future, Prof. Viana and his team plan on expanding the use of SimNet in their hybrid PINNs for cumulative damage by tackling even more complex applications where loading and deformation are highly nonlinear and potentially involve multiphysics. Given the flexibility of the approach, he hopes to expand the applications to other industries besides civil aviation and failure modes, such as corrosion and oxidation.
Prof. Viana elaborated on his experience. “SimNet’s accuracy is comparable to other computational mechanics software. However, its computational efficiency, quick turnaround time, and easy integration with existing machine learning frameworks makes it our choice of toolkit for our simulation needs. With SimNet, we scaled our predictive model to a fleet of 500 aircraft and get predictions in less than 10 seconds. If we were to perform the same computations using high-fidelity finite element models, we could be talking about a few days to a week. As a research institution, we see SimNet as a tool of the future where it unlocks possibilities and enables us to explore modeling approaches that were not possible before.”
For more information, see the following resources:
To ask questions about Prof. Viana’s work and see what others are doing with SimNet toolkit, join the SimNet forum. For more information about SimNet’s features and to download the SimNet toolkit, see NVIDIA SimNet.
Speedy diagnoses are critical, especially when a loved one seems to be slowly losing their cognitive abilities. Researchers from the Kaunas University of Technology in Lithuania report they’ve developed a deep learning-based method able to predict the possible onset of Alzheimer’s disease from brain images with an accuracy of over 99 percent. The impact of Read article >
The NVIDIA Clara AGX development kit with the us4R ultrasound development system makes it possible to quickly develop and test a real-time AI processing system for ultrasound imaging.
The NVIDIA Clara AGX development kit with the us4R ultrasound development system makes it possible to quickly develop and test a real-time AI processing system for ultrasound imaging. The Clara AGX development kit has an Arm CPU and high-performance RTX 6000 GPU. The us4R teamwork provides ultrasound system designers with the ability to develop, prototype, and test end-to-end software-defined ultrasound systems. Clara AGX is launching the era of software-defined medical instruments with reconfigurable pipelines without changes to the hardware.
The us4us hardware and SDK provide an end-to-end ultrasound algorithm development and RF processing platform, while the high-end Clara AGX GPU enables real-time deep learning and AI image reconstruction and inferencing. With this approach, the whole systems engineering team benefits: beamforming experts can create optimal beam strategies, and AI experts can design and deploy the next generation of real-time algorithms.
This combined hardware and software platform democratizes ultrasound development for both research labs and commercial vendors to develop novel features. No longer are massive capital budgets required to design, prototype, and test functional hardware. Each stage of the device pipeline can be modified. Data acquisition, data processing, image reconstruction, image processing, AI analysis, and visualization are all defined in software and executed in real time with low latency performance. The system is completely configurable and can create new RF transmission waveforms and beamforming algorithms using AI or traditional approaches.
With ultrafast, low latency end-to-end data transfer is possible with NVIDIA ConnectX-6 SmartNIC 100Gb/s ethernet and RDMA data transfer to the GPU. The NVIDIA supercharged GPU can run circles around existing legacy premium-cost systems. It enables improved signal-to-noise, real-time processing of highly advanced and complex algorithms in image reconstruction, denoising, and pipelines.
The GPU has enough headroom for multiple real-time clinical inferencing predictions to run simultaneously, including measurement, operator guidance, image interpretation, tissue and organ identification, advanced visualization, and clinical overlays.
Commercialization of clinical applications of the Clara AGX hardware will be available with medical-grade hardware from third party vendors in a compact and energy-efficient CPU+GPU SoC form-factor similar to that in self-driving automotive applications.
The Clara AGX development kit is a high-end performance workstation built with development of medical applications in mind. The system includes an NVIDIA RTX 6000 GPU, delivering 200+ INT8 AI TOPs and 16.3 FP32 TFLOPS at peak performance, with 24 GB of VRAM. This leaves plenty of headroom for running multiple models. High-bandwidth I/O communication with sensors is possible with the 100G Ethernet Mellanox ConnectX-6 network interface card (NIC).
NVIDIA partners are currently using the Clara AGX development kit to develop ultrasound, endoscopy, and genomics applications.
Advanced us4R with up to 1024 TX / 256 RX channels
A portable us4R-lite with 256 TX / 64 RX channels
Both use a PCIe streaming architecture for low-latency data transfer and GPU for scalable processing of raw ultrasound echo signals. The us4OEM ultrasound frontend modules support 128TX/32RX analog channels and high throughput 3GB/s, PCIe Gen3 x4 data interface (Figure 2).
Figure 3. Us4r-lite and Clara AGX platform
End-to-end, software-defined ultrasound design
The ARRUS package is an SDK for the us4R that provides a high-level hardware abstraction layer enabling systems programming in Python, C++, or MATLAB. The hardware programming is performed by defining RF module including the following:
Active transmit (TX) probe elements
Transmission parameters, such as TX voltage, TX waveform, and TX delays
Receive (RX) aperture and acquisition parameters such as gain, filters, and time-gain compensation
Commonly used TX/RX sequences, such as classical linear scanning, plane wave imaging (PWI) and synthetic transmit aperture (STA) are preconfigured and can be quickly implemented. Custom sequences are configured with user-defined, low-level parameters like TX/RX apertures mask and TX delays.
The ARRUS package also includes a Python implementation of many standard ultrasound processing algorithms for image reconstruction, including raw RF data, RF data preprocessing (data filtering, quadrature demodulation, and so on), beamforming (PWI, STA, and classical schemes), and post-processing of B-mode images.
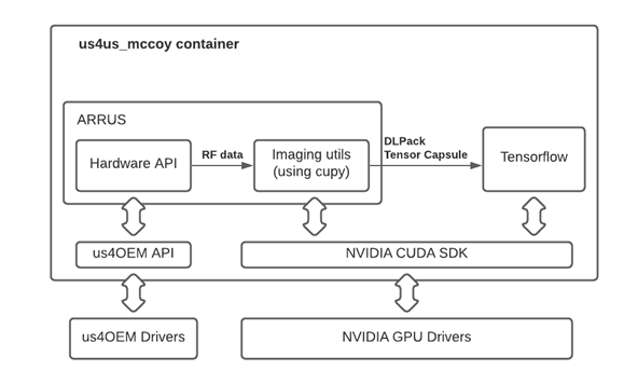
These algorithms are building blocks used to construct an arbitrary imaging pipeline that can handle the RF data stream produced by the us4R system. GPU accelerated numerical routines are provided by cuPy. DLPack specifies a common in-memory Tensor structure that enables data sharing between machine learning frameworks and GPU processing libraries, while using RDMA no additional overhead is required to copy data between them. The DLPack interface provides access to predefined or user-developed deep learning models in TensorFlow, PyTorch, Chainer, and MXNet.
Figure 4. NGC container software schematic for this release
US4US ultrasound demo
By combining the software and hardware stack, you can quickly implement an ultrasound workflow with configurable parameters in less than one page of easy-to-read Python code. In this section, we show you how to use the ARRUS APIs, a us4R-lite platform, and the Clara AGX DevKit to create your own ultrasound imaging pipeline in minutes.
The following code example should work with the proper environment. However, we recommend using the Docker container available directly through NGC. There is an interactive Jupyter notebook available to help guide you through this demo in the container at /us4us_examples/mimicknet-example.ipynb.
Start by importing the relevant libraries, including ARRUS, Numpy, TensorFlow, and CuPy:
# Imports for ARRUS, Numpy, TensorFlow and CuPy
import arrus
import arrus.session
import arrus.utils.imaging
import arrus.utils.us4r
import numpy as np
from arrus.ops.us4r import (Scheme, Pulse, DataBufferSpec)
from arrus.utils.imaging import ( Pipeline, Transpose, BandpassFilter, Decimation, QuadratureDemodulation, EnvelopeDetection, LogCompression, Enqueue, RxBeamformingImg, ReconstructLri, Sum, Lambda, Squeeze)
from arrus.ops.imaging import ( PwiSequence )
from arrus.utils.us4r import ( RemapToLogicalOrder )
from arrus.utils.gui import ( Display2D )
from utilities import RunForDlPackCapsule, Reshape
import TensorFlow as tf
import cupy as cp
Next, instantiate the PWI Tx and Rx sequences. You define the parameters for the data that you’re pulling from the US4US Ultrasound system in the PwiSequence function.
After defining the sequence, load the deep learning model parameters. For this, you have two different deep neural networks options for improving B-mode image output quality, both available for download through NGC.
The NN_Bmode model, from researchers at Stanford, produces despeckled images using a neural network from beamformed low-resolution images (LRI). The LRI is created after a single synthetic aperture transmission; in this case, a single plane wave insonification. A sequence of LRIs can be compounded into a high-resolution image (HRI) by coherently summing them together.
The generative adversarial networks (GANs) model is used to imitate B-mode image post-processing found in commercial ultrasound systems. This algorithm uses the standard delay-and-sum (DAS) reconstruction and B-mode post-processing pipeline with the MimickNet CycleGAN. For more information, see MimickNet, Mimicking Clinical Image Post-Processing Under Black-Box Constraints.
For this example, you load the MimickNet CycleGAN. In addition to loading the weights, you are implementing simple normalize and mimicknet_predict wrapper functions required when you implement the scheme definition in the next step.
# Load MimickNet model weights
model = tf.keras.models.load_model(model_weights)
model.predict(np.zeros((1, z_size, x_size, 1), dtype=np.float32))
def normalize(img):
data = img-cp.min(img)
data = data/cp.max(data)
return data
def mimicknet_predict(capsule):
data = tf.experimental.dlpack.from_dlpack(capsule)
result = model.predict_on_batch(data)
# Compensate a large variance of the image mean brightness.
result = result-np.mean(result)
result = result-np.min(result)
result = result/np.max(result)
return result
You can put all of the pieces together using the Scheme function. The Scheme function takes parameters for the tx/rx sequence definition: an output data buffer, the ultrasound device work mode, and a data processing pipeline. These parameters define the workflow for data acquisition, data processing, and displaying the inference results.
The following code example shows the Scheme definition, which includes the sequence, MimickNet preprocessing, and inference wrapper function defined earlier. The placement parameter indicates that the processing pipeline runs on GPU:0, which provides GPU acceleration on the Clara AGX Dev Kit.
Your device now displays the results of the ultrasound imaging pipeline. You can also easily modify this pipeline to implement your own state-of-the-art deep learning algorithms. Figure 5 shows the example output from the demo comparing a conventional delay and sum algorithm (left) and the MimickNet model (right).
Figure 5. Scan of an ultrasound phantom using standard delay and sum (left), NN_Bmode despeckling neural network (middle), MimickNet CycleGAN network (right)
Clara AGX is launching the era of software-defined medical instruments with re-configurable pipelines without changes to the hardware. Connecting the Clara AGX development kit with the us4R ultrasound development system creates a combination that helps you develop a real-time AI processing system easily and quickly. With the high performance of an RTX 6000 GPU and an Arm CPU, you get the best of the embedded hardware ecosystem to develop your own state-of-the-art, task-specific algorithms.
For more information about the us4R-lite system, contact us4us. The Clara AGX Developer Kit is currently available exclusively for members of the NVIDIA Clara Developer Partner Program.
Posted by Katrin Tomanek, Software Engineer and Bob MacDonald, Technical Program Manager, Google Research
Speech impairments affect millions of people, with underlying causes ranging from neurological or genetic conditions to physical impairment, brain damage or hearing loss. Similarly, the resulting speech patterns are diverse, including stuttering, dysarthria, apraxia, etc., and can have a detrimental impact on self-expression, participation in society and access to voice-enabled technologies. Automatic speech recognition (ASR) technologies have the potential to help individuals with such speech impairments by improving access to dictation and home automation and by enhancing communication. However, while the increased computational power of deep learning systems and the availability of large training datasets has improved the accuracy of ASR systems, their performance is still insufficient for many people with speech disorders, rendering the technology unusable for many of the speakers who could benefit the most.
Impaired Speech Data Collection Since 2019, speakers with speech impairments of varying degrees of severity across a variety of conditions have provided voice samples to support Project Euphonia’s research mission. This effort has grown Euphonia’s corpus to over 1 million utterances, comprising over 1400 hours from 1330 speakers (as of August 2021).
To simplify the data collection, participants used an at-home recording system on their personal hardware (laptop or phone, with and without headphones), instead of an idealized lab-based setting that would collect studio quality recordings.
To reduce transcription cost, while still maintaining high transcript conformity, we prioritized scripted speech. Participants read prompts shown on a browser-based recording tool. Phrase prompts covered use-cases like home automation (“Turn on the TV.”), caregiver conversations (“I am hungry.”) and informal conversations (“How are you doing? Did you have a nice day?”). Most participants received a list of 1500 phrases, which included 1100 unique phrases along with 100 phrases that were each repeated four more times.
Speech professionals conducted a comprehensive auditory-perceptual speech assessment while listening to a subset of utterances for every speaker providing the following speaker-level metadata: speech disorder type (e.g., stuttering, dysarthria, apraxia), rating of 24 features of abnormal speech (e.g., hypernasality, articulatory imprecision, dysprosody), as well as recording quality assessments of both technical (e.g., signal dropouts, segmentation problems) and acoustic (e.g., environmental noise, secondary speaker crosstalk) features.
Personalized ASR Models This expanded impaired speech dataset is the foundation of our new approach to personalized ASR models for disordered speech. Each personalized model uses a standard end-to-end, RNN-Transducer (RNN-T) ASR model that is fine-tuned using data from the target speaker only.
Architecture of RNN-Transducer. In our case, the encoder network consists of 8 layers and the predictor network consists of 2 layers of uni-directional LSTM cells.
To accomplish this, we focus on adapting the encoder network, i.e. the part of the model dealing with the specific acoustics of a given speaker, as speech sound disorders were most common in our corpus. We found that only updating the bottom five (out of eight) encoder layers while freezing the top three encoder layers (as well as the joint layer and decoder layers) led to the best results and effectively avoided overfitting. To make these models more robust against background noise and other acoustic effects, we employ a configuration of SpecAugment specifically tuned to the prevailing characteristics of disordered speech. Further, we found that the choice of the pre-trained base model was critical. A base model trained on a large and diverse corpus of typical speech (multiple domains and acoustic conditions) proved to work best for our scenario.
Results We trained personalized ASR models for ~430 speakers who recorded at least 300 utterances. 10% of utterances were held out as a test set (with no phrase overlap) on which we calculated the word error rate (WER) for the personalized model and the unadapted base model.
Overall, our personalization approach yields significant improvements across all severity levels and conditions. Even for severely impaired speech, the median WER for short phrases from the home automation domain dropped from around 89% to 13%. Substantial accuracy improvements were also seen across other domains such as conversational and caregiver.
WER of unadapted and personalized ASR models on home automation phrases.
To understand when personalization does not work well, we analyzed several subgroups:
HighWER and LowWER: Speakers with high and low personalized model WERs based on the 1st and 5th quintiles of the WER distribution.
SurpHighWER: Speakers with a surprisingly high WER (participants with typical speech or mild speech impairment of the HighWER group).
Different pathologies and speech disorder presentations are expected to impact ASR non-uniformly. The distribution of speech disorder types within the HighWER group indicates that dysarthria due to cerebral palsy was particularly difficult to model. Not surprisingly, median severity was also higher in this group.
To identify the speaker-specific and technical factors that impact ASR accuracy, we examined the differences (Cohen’s D) in the metadata between the participants that had poor (HighWER) and excellent (LowWER) ASR performance. As expected, overall speech severity was significantly lower in the LowWER group than in the HighWER group (p < 0.01). Intelligibility and severity were the most prominent atypical speech features in the HighWER group; however, other speech features also emerged, including abnormal prosody, articulation, and phonation. These speech features are known to degrade overall speech intelligibility.
The SurpHighWER group had fewer training utterances and lower SNR compared with the LowWER group (p < 0.01) resulting in large (negative) effect sizes, with all other factors having small effect sizes, except fastness. In contrast, the HighWER group exhibited medium to large differences across all factors.
Speech disorder and technical metadata effect sizes for the HighWER-vs-LowWER and SurpHighWER-vs-LowWER pairs. Positive effects indicated that the group values of the HighWER group were greater than LowWER groups.
We then compared personalized ASR models to human listeners. Three speech professionals independently transcribed 30 utterances per speaker. We found that WERs were, on average, lower for personalized ASR models compared to the WERs of human listeners, with gains increasing by severity.
Delta between the WERs of the personalized ASR models and the human listeners. Negative values indicate that personalized ASR performs better than human (expert) listeners.
Conclusions With over 1 million utterances, Euphonia’s corpus is one of the largest and most diversely disordered speech corpora (in terms of disorder types and severities) and has enabled significant advances in ASR accuracy for these types of atypical speech. Our results demonstrate the efficacy of personalized ASR models for recognizing a wide range of speech impairments and severities, with potential for making ASR available to a wider population of users.
Acknowledgements Key contributors to this project include Michael Brenner, Julie Cattiau, Richard Cave, Jordan Green, Rus Heywood, Pan-Pan Jiang, Anton Kast, Marilyn Ladewig, Bob MacDonald, Phil Nelson, Katie Seaver, Jimmy Tobin, and Katrin Tomanek. We gratefully acknowledge the support Project Euphonia received from members of many speech research teams across Google, including Françoise Beaufays, Fadi Biadsy, Dotan Emanuel, Khe Chai Sim, Pedro Moreno Mengibar, Arun Narayanan, Hasim Sak, Suzan Schwartz, Joel Shor, and many others. And most importantly, we wanted to say a huge thank you to the over 1300 participants who recorded speech samples and the many advocacy groups who helped us connect with these participants.
Good day everyone and we hope you’re all doing ok. we felt a vacuum for a sub dedicated for ML engineering on Reddit. ML engineering as in “application of ML’ in real world. We are sure that a lot of people here do ML engineering as a job and they will be interested in having a place to share articles, ask questions, and in general, have a chill time with their passion. /r/ML_Eng focuses on the following:
– Application of Machine learning
– Implementing papers
– SMACK Stack and similar data pipeline tools
– Databases
– Model deployment
– DevOps related to ML
– Creating frontends for your model
/r/ML_End is a place where intermediate to advanced programmers who aren’t PhDs in ML can feel welcome. Anyting regarding application of ML is welcome. So join us there and we hope it all will be for the better!
Two of Ubisoft’s biggest upcoming games will join GeForce NOW the day they’re released, and you can get ready to breach in a new season of Rainbow Six Siege with a free-to-play weekend. Plus, it’s time to find your true colors in the newest entry in the Life Is Strange series, one of the 10 Read article >
From award-winning research demos to photorealistic graphics created with NVIDIA RTX and Omniverse, see how NVIDIA is breaking boundaries in AI, graphics, and virtual collaboration.
It’s one thing to hear about something new, amazing, or downright mind-blowing. It’s a completely different experience when you can see those breakthroughs visualized and demonstrated. At SIGGRAPH 2021, NVIDIA introduced new and stunning demos showcasing how the latest technologies are transforming workflows across industries.
From award-winning research demos to photorealistic graphics created with NVIDIA RTX and Omniverse, see how NVIDIA is breaking boundaries in AI, graphics, and virtual collaboration.
Watch some of the exciting demos featured at SIGGRAPH:
Real-Time Live! Demo: I AM AI: AI-Driven Digital Avatar Made Easy
This demo won the Best in Show award at SIGGRAPH. It showcases the latest AI tools that can generate digital avatars from a single photo, animate avatars with natural 3D facial motion, and convert text to speech.
Interactive Volumes with NanoVDB in Blender Cycles
See how NanoVDB makes volume rendering more GPU memory-efficient, so larger and more complex scenes can be interactively adjusted and rendered with NVIDIA RTX-accelerated ray tracing and AI denoising.
Interactive Visualization of Galactic Winds with NVIDIA Omniverse
Learn more about NVIDIA IndeX, a volumetric visualization tool for researchers to visualize large scientific datasets interactively, for deeper insights. With Omniverse, users can virtually collaborate in real time, from any location, while using multiple apps simultaneously.
Accelerating AI in Photoshop Neural Filters with NVIDIA RTX A2000
Watch how AI-enhanced Neural Filter in Adobe Photoshop accelerated with NVIDIA RTX A2000 takes photo editing to the next level. Combining NVIDIA RTX A2000 with Photoshop AI, tools like Skin Smoothing and Smart Portrait give photo editors the power of AI for creating stunning portraits.
Multiple Artists, One Server
Discover how to accelerate visual effects production with the NVIDIA EGX Platform, which enables multiple artists to work together on a powerful, secure server from anywhere.
Visit the SIGGRAPH page to watch all the newest demos, catch up on the latest announcements, and explore on-demand content.
Sign up for webinars with NVIDIA experts and Metropolis partners on Sept. 22, featuring developer SDKs, GPUs, go-to-market opportunities, and more.
Join NVIDIA experts and Metropolis partners on Sept. 22 for webinars exploring developer SDKs, GPUs, go-to-market opportunities, and more. All three sessions, each with unique speakers and content, will be recorded and will be available for on-demand viewing later.
Session 1: NVIDIA Fleet Command | Best Practices for Vision AI Development
Wednesday, September 22, 2021, 1 PM PDT
Learn how to securely deploy, manage, and scale your AI applications with NVIDIA Fleet Command.
Hear from Data Monsters, a solution development partner, on how they use Metropolis to solve some of the world’s most challenging Vision AI problems.
Session 2: NVIDIA Ampere GPUs | Synthetic Data to Accelerate AI Training
Wednesday, September 22, 2021, 4 PM CEST
Explore how the latest NVIDIA Ampere GPUs significantly reduce deployment costs and provide more flexible vision AI app options.
No data, no problem! Our synthetic data partner, SKY ENGINE AI, shows how to use synthetic data to fast-track your AI development.
Session 3: NVIDIA Pre-Trained Models | Go-To-Market Opportunities with Dell
Wednesday, September 22, 2021, 1 PM JST
Learn how the Dell OEM team can help bring your Metropolis solutions to market faster.
Go from zero to world-class AI in days with NVIDIA pretrained models. NVIDIA experts will show how to use the PeopleNet model to build an application in minutes and harness TAO Toolkit to adapt the application to different environments.

 BlueField-2 offers protection, while delivering high security, integrity, and reliability for the new hybrid cloud era.
BlueField-2 offers protection, while delivering high security, integrity, and reliability for the new hybrid cloud era. Simulations are pervasive in every domain of science and engineering, but they often have constraints such as large computational times, limited compute resources, tedious manual setup efforts, and the need for technical expertise. Neural networks not only accelerate simulations done by traditional solvers, but also simplify simulation setup and solve problems not addressable by traditional …
Simulations are pervasive in every domain of science and engineering, but they often have constraints such as large computational times, limited compute resources, tedious manual setup efforts, and the need for technical expertise. Neural networks not only accelerate simulations done by traditional solvers, but also simplify simulation setup and solve problems not addressable by traditional … 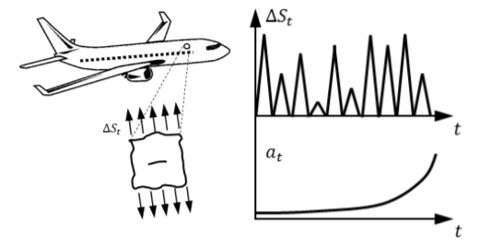



 is the Cauchy stress tensor,
is the Cauchy stress tensor,  is the Kronecker delta function and
is the Kronecker delta function and  is the strain tensor. The inputs to this parameterized model are the loading condition (the hoop stresses) and the spatial coordinates of batches of a point cloud within the computational domain. The outputs are the stresses and displacements. The network architecture consists of a Fourier feature encoding layer followed by several fully connected layers.
is the strain tensor. The inputs to this parameterized model are the loading condition (the hoop stresses) and the spatial coordinates of batches of a point cloud within the computational domain. The outputs are the stresses and displacements. The network architecture consists of a Fourier feature encoding layer followed by several fully connected layers. 
 : number of cycles
: number of cycles and
and  : material properties (obtained through coupon tests)
: material properties (obtained through coupon tests)
 : cyclic stresses (for example, from finite element models)
: cyclic stresses (for example, from finite element models)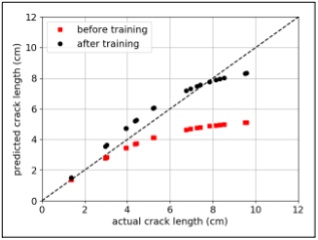
 The NVIDIA Clara AGX development kit with the us4R ultrasound development system makes it possible to quickly develop and test a real-time AI processing system for ultrasound imaging.
The NVIDIA Clara AGX development kit with the us4R ultrasound development system makes it possible to quickly develop and test a real-time AI processing system for ultrasound imaging.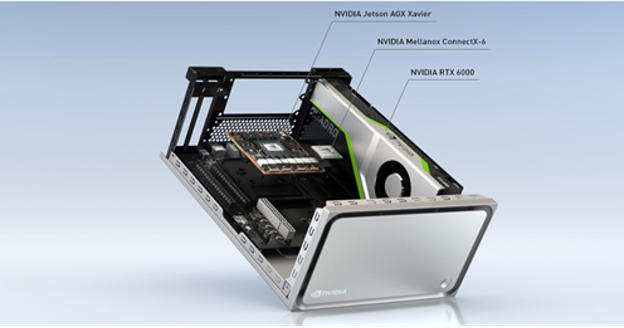








 From award-winning research demos to photorealistic graphics created with NVIDIA RTX and Omniverse, see how NVIDIA is breaking boundaries in AI, graphics, and virtual collaboration.
From award-winning research demos to photorealistic graphics created with NVIDIA RTX and Omniverse, see how NVIDIA is breaking boundaries in AI, graphics, and virtual collaboration.  Sign up for webinars with NVIDIA experts and Metropolis partners on Sept. 22, featuring developer SDKs, GPUs, go-to-market opportunities, and more.
Sign up for webinars with NVIDIA experts and Metropolis partners on Sept. 22, featuring developer SDKs, GPUs, go-to-market opportunities, and more.