우리는 점점 협업이 중요해지는 시대에 살고 있습니다. 도메인과 기술, 각각의 분야는 갈수록 세밀해지고 고도화되고 있기 때문에, 혼자서 이 모든 것을 다 알기란 불가능에 가까워지고 있습니다. 그래서 한명의 천재보다는 훌륭한 팀이 더 좋은 결과들을 만들어 내는 시대입니다.
출처: pixabay
면접에서 커뮤니케이션 스킬 역시 중요하게 평가되고 있죠. ‘팀원과의 협업에서 어려움이 있을 때 어떻게 하셨나요?’ 이런 질문들은 흔하게 접하셨을 것 같습니다. 여기에서 저는 개인적으로 ‘팀으로 일하면서 팀원 모두의 성장을 위해서 무엇을 해보았나요?’ 이 질문을 좋아합니다. 개인이 성장하는 것이 선형적이라면, 팀으로 성장하는 것은 기하급수적으로 볼 수 있기 때문입니다.
이번에 소개하는 책의 저자께서도 이 책을 읽으며, 다음과 같은 질문들로 생각이 나아갈 수 있기를 기대하고 있습니다.
우리가 정말 함께 자랄 수 있을까?
우리가 정말 매일매일 함께 자랄 수 있을까?
함께 자라기 : 애자일로 가는 길
출처: 알라딘 ‘함께 자라기’
이번 책은 애자일 컨설팅으로 알려져 있는 김창준님의 ≪함께 자라기≫ 입니다. 이 책은 그 동안 블로그와 페이스 북 등에서 공유해오시던 효과적으로 배우는 방법과 협업에 대한 다양한 글들을 엮은 결과입니다. 이 책의 특징 중 하나는 연구, 논문 등의 자료를 기반으로 조금 더 구체적이고 분석적으로 성장과 협업에 대해서 바라 본다는 것 입니다.
그럼 책의 내용들을 조금 더 살펴보겠습니다. 1장 자라기 에서는 성장을주제로 다양한 이야기를 하고 있습니다.
시스템
저는 시스템과 프로세스가 중요하다고 생각을 합니다. 적합한 사람들을 뽑는 것이 무엇보다 중요하지만, 이 사람들이 마음껏 능력을 펼칠 수 있는 조직의 시스템도 그에 못지 않게 중요합니다.
조직은 개인이 자신의 전문성을 좀 더 발전시키고 관리할 수 있게 최대한 지원을 해야 합니다. 그것이 윈윈하는 길입니다. 뽑고 나서 잘 교육하고 성장하게 도와주는 것 이상으로 중요한 것이 또 있습니다. 시스템입니다. 아무리 훌륭한 사람을 뽑아도 조직의 시스템과 문화에 문제가 있으면 그런 사람은 묻혀버리기 쉽고, 반대로 실력이 평범한 사람일지라도 좋은 시스템 속에서 뛰어난 성과를 낼 수도 있습니다.
잘 뽑는 것 이상으로 중요한 것 중에서
프로세스와 시스템은 아래 더글러스의 말에서 B와 C단계에 해당하는 일 입니다. 이렇게 한 단계 혹은 한 차원 높게 개선을 함으로써 그 조직은 계속해서 발전할 수 있는 것이죠. 항상 일을 함에 있어서 언제 무엇에 집중해야 할지를 생각하는 것이 필요합니다. 일례로 스타트업에서는 빠르게 A 작업을 해내는 것이 중요한 반면, 대기업에서는 더 빠르게 확장할 수 있도록 B작업, 즉 프로세스를 개선하는데 집중해야 하는 것이죠.
더글러스는 작업을 세 가지 수준으로 구분합니다. A, B, C 작업입니다.
A 작업은 원래 그 조직이 하기로 되어 있는 일을 하는 걸 말합니다.
B 작업은 A 작업을 개선하는 걸 말합니다. 제품을 만드는 사이클에서 시간과 품질을 개선하는 것이죠
C 작업은 B 작업을 개선하는 것 입니다. 개선 사이클 자체의 시간과 품질을 개선하는 것입니다. … 한마디로 개선하는 능력을 개선하는 걸 말합니다.
더글러스는 “우리가 더 잘하는 것을 더 잘하게 될수록 우리는 더 잘하는 걸 더 잘 그리고 더 빨리 하게 될 것이다”
복리의 비밀 중에서
의도적 수련
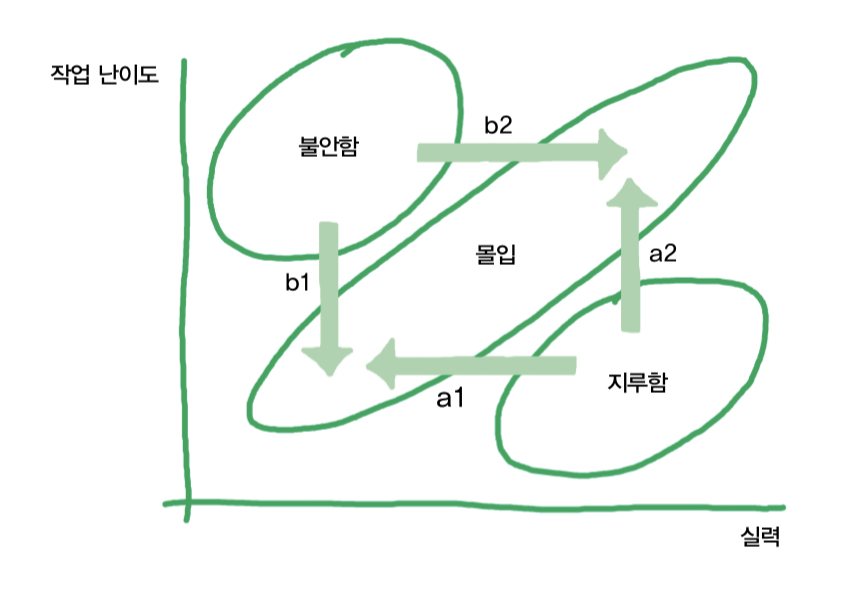
출처: 함께자라기 ‘제자리걸음에서 벗어나기’ 중에서
의도적 수련은 자신의 실력에 맞춰서 가장 빠르게 배울 수 있는 방법 중에 하나입니다. 위 그림처럼, ‘작업 난이도’ 와 ‘실력’ 을 유사한 수준으로 맞춰서 일에 몰입할 수 있도록 하는 것이죠. 너무 쉬운 일이라면, 스스로 퀘스트를 부여하면서 더 문제를 어렵게 만들거나 어려운 일의 경우에는 주변의 도움을 받기도 하고, 문제를 구조적으로 접근함녀서 난이도를 낮추는 방법 등을 제시하고 있습니다.
의도적 수련이 되려면 나의 실력과 작업의 난이도가 비슷해야 합니다. 이것은 미하이 칙센트미하이의 몰입이론(무슨 활동을 하냐가 중요한게 아니라 뭘 하든지 몰입해서 하면 만족도가 올라갔다)과도 일치하는 부분인데요, … 우리가 주목해야 할 부분은 C 영역입니다. 난이도와 실력이 엇비슷하게 맞는 부분이죠. 미하이는 이 부분에서 인간이 몰입을 경험한다고 합니다. 그리고 바로 이때 최고 수준의 집중력을 보이고, 그 덕분에 퍼포먼스나 학습 능력이 최대치가 될 수 있다고 합니다. 또한 그때 최고 수준의 행복감을 경험한다는 흥미로운 사실을 발견하기도 했습니다. 비슷한 이야기를 언어학자인 크라센이 입력가설을 통해 말합니다. i+1 이론이라고 하는데, 현재 언어 학습자의 언어 수준을 i라고 할 때 딱 한 단계 높은 i+1 수준의 입력이 주어질 때에만 언어 능력이 유의미하게 진전한다는 이론이죠.
의도적 수련의 필수조건, 적절한 난이도 중에서
다음으로 2장 함께 에서는 협업에 대한 다양한 주제들을 다루고 있습니다.
심리적 안전감
성공적인 팀의 특징들 중에서 가장 중요하다고 이야기 되는 요소가 바로 ‘심리적 안전감’ 입니다. 이 ‘심리적 안전감’ 하나의 주제만을 가지고 다양한 이야기하는 ≪두려움 없는 조직≫ 이라는 책도 있죠. 어떻게 보면 뻔하게 보이기도 하지만 그 만큼 심리적 안전감을 팀 내에 정착시키는 것은 어렵기도 합니다.
구글은 데이터 중심 회사답게 데이터 기반으로 뛰어난 관리자의 특징을 찾는 옥시전 프로젝트 이후에도 뛰어난 팀의 특징을 찾기 위해 2년간 노력했습니다. 이름하여 아리스토텔레스 프로젝트 입니다.
팀에 누가 있는지 (전문가, 내향/외향, 지능 등) 보다 팀원들이 서로 어떻게 상호작용하고 자신의 일을 어떻게 바라보는지가 훨씬 중요했다.
5가지 성공적 팀의 특징을 찾았는데, 그중 압도적으로 높은 예측력을 보인 변수는 팀의 심리적 안전감이었다.
팀 토론 등 특별히 고안된 활동을 통해 심리적 안전감을 개선할 수 있었다.
구글이 밝힌 탁월한 팀의 비밀 중에서
심리적 안전감은 보통 조직문화를 기반으로 하고 있다고 이야기합니다. 조직문화 중에서도 특히 ‘투명성’ 에 연결이 됩니다. 아래 사례처럼, 실수를 투명하게 공개하고 더 나은 방향으로 모두 나아갈 수 있는 것. 그 외에도 회사 내에서 정보가 투명하게 흐르게 되면 서로 간의 신뢰가 생기기 때문입니다. 이 신뢰가 곧 심리적 안전감으로 직결되게 되죠.
마이클 프레제는 회사에서의 실수 문화에 대해 연구를 했습니다. 그에 따르면 실수 문화에는 크게 두 가지가 있습니다. 실수 예방과 실수 관리. 실수 예방은 행동에서 실수로 가는 경로를 차단하려고 합니다. 즉, 실수를 저지르지 말라고 요구합니다. 근데, 사실 이것이 불가능에 가깝습니다. 전문가도 1시간에 평균 3~5개의 실수를 저지른다고 합니다. … 실수 예방 문화에서는 실수를 한 사람을 비난하고, 처벌하고, 따라서 실수를 감추고 그에 대해 논의하기 꺼리며 문제가 생겼을 때 협력도 덜하게 됩니다. 실수에서 배우지 못하겠지요. 반대로 실수 관리 문화에서는 실수가 나쁜 결과를 내기 전에 빨리 회복하도록 돕고, 실수를 공개하고, 실수에 대해 서로 이야기하고 거기에서 배우는 분위기가 생깁니다.
이 부분이 굉장히 중요합니다. 실수 연구의 역사를 보면, 초기에는 기술적인 부분만 보다가 그 다음에는 인간적인 부분 (결국 80%가 사람 실수라든지)을 보다가 이제는 문화적인 부분을 이야기합니다. 심리적 안전감이라고 하는 것이 이 문화의 일부입니다.
두 가지의 실수 문화 중에서
추상화
다음은 개발자들끼리 많이 진행하는 짝 프로그래밍에 대한 이야기 입니다. 그 동안 많이 해봤음에도, 왜 효과적인지 잘 모르고 있다가 이 책을 읽으면서 깨닫게 되는 사례 중에 하나였습니다. 짝 프로그래밍까지 가지 않더라도 문제에 대해서 설명하다가 스스로 좋은 방법을 찾기도 하는데, 이것 역시 설명의 과정에서 추상화를 시키면서 스스로 이해도가 높아지기 때문이 아닐까 싶습니다.
짝 프로그래밍은 두 사람이 한 컴퓨터를 사용해 함께 프로그래밍하는 것입니다. 생각할수록 짝 프로그래밍의 구성은 절묘합니다. 두 사람이라는 구성은 대화를 통해 추상화를 높이게 합니다. 한 컴퓨터라는 구성은 구체화를 통해 검증하게 합니다. 미루고 헤아리는 것) 이 빈번히 교차합니다. 그리고 그 사이에서 “아하”가 터져 나옵니다. … 자신이 작성하는 코드의 추상성을 높이고 싶다면 혼자서 고민하지 말고 다른 사람들과 협동하고, 대화하세요. 같이 그림도 그려보고 함께 소스코드를 편집하세요. 인간에게는 다른 인간과 소통하고 협력할 수 있는 놀라운 능력이 있습니다. 대화는 기적입니다.
대화하는 프로그래밍 중에서
새로운 방법론의 도입
아마 많은 이런 경험이 많이 있으실 것 같습니다. 같이 일을 하면서 새로운 프레임워크 혹은 애자일 등의 방법론 혹은 도구를 도입하는 것이죠. 무난하게 도입을 한 경우도 있을 것이고, 생각하지 못한 반대의견을 맞닥뜨린 경우도 있을 것 입니다. 어떻게 하는 것이 가장 좋은 방법인지 모르겠지만, 동료분들과 이야기를 충분히 하고 니즈를 이해해야 한다는 것 입니다. 이 도구가 왜 좋은지 보다는 동료분들이 어떤 생각을 가지고 있는지 알아보는 것이 어떨까요?
그리고 이렇게 대화를 하면서, 중간의 매개체가 될 수 있다면 단순히 도구를 도입하려는 시도에서 더 나아가 팀에서 필요로 하는 것이 무엇인지 제대로 이해하고 더 좋은 방안을 제시할 수 있을 것 입니다.
팀장 자리에 있으면 새로운 아이디어 전파가 쉬울 거라고 생각하는 것은 환상입니다. … 그 중 어떤 분들은 이미 나름의 객관적 수치들을 수집하고 계시죠. 그런 분들을 만나면 저는 다음과 같은 질문을 던집니다. “상대방에 대해 얼마나 이해를 하고 계신가요? 얼마나 대화를 해보셨나요?” 십중팔구는 “그분이랑은 별로 이야기 못 해봤습니다.” 란 답이 돌아옵니다. 만약 그렇다면 앞으로도 설득에 성공할 확률은 낫다고 봐야 합니다.
객관성의 주관성 중에서
복잡한 분야일수록 어떤 특정 기법의 효과보다도 치료자 효과가 더 큰 영향을 미칠 것입니다. 그렇다면 어떻게 해야 할까요? 슈퍼슈링크들을 찾고 그들을 연구하고 육성해야 합니다. … 소프트웨어 개발 방법론, 새 프로젝트를 진행할 때에 우리가 어떤 방법론을 쓰느냐는 문제보다도 누가 참여하는가가 훨씬 더 압도적으로 중요한 문제가 아닐까요? 여러분은 어떻게 생각하시나요? 저는 이렇게 생각합니다. 예를 들어 애자일 방법론 도입을 원하는 팀장이라면 “나는 어떤 팀장인가”를 먼저 자문해봐야 하지 않을까 싶습니다.
당신의 조직에 새 방법론이 먹히지 않는 이유 중에서
다음은 전문가들끼리 팀이 구성되었을 때, 가장 효과적일지에 대한 이야기가 있습니다. 분야가 겹치지 않는 상황에서는 전문가들이 서로의 전문성을 믿고 각자 최고의 결과를 만들어 낼 수 있지만, 비슷한 분야에서 전문가들이 같이 일을 하는 것은 개인에서 협업을 하게되는 상황이기도 합니다. 이때에는 필연적으로 생산성이 떨어지는 순간들이 있게 되는 것 같습니다. 협업에는 연습이 필요하기 때문이죠.
회사에서의 올스타는 어떨까요? 그로이스버그(Groysberg) 등의 연구에 따르면 이런 스타들이 한 명씩 팀에 추가될 때마다 팀의 추가적 성과 향상은 한계효용(점차 줄어듬)을 보이며 어느 수준을 지나면 음의 방향으로 작용한다(즉, 전체 팀의 성과를 깎아먹음)”고 합니다. … 성과를 깎아먹는 경향은 특히 전문가들이 전문성이 서로 유사할 때 도드라졌습니다. 이 연구는 그 원인 중 하나로 전문가들의 에고(ego)를 꼽습니다.
전문가팀이 실패하는 이유 중에서
애자일
마지막 3장에서는 애자일에 대한 이야기가 간단하게 다루어집니다. 사실 앞의 1장, 2장에서도 ‘애자일’ 이라는 용어만 쓰지 않았지, 주제는 애자일에 포함되는 이야기였기 때문이죠.
그 동안 일을 해오면서, 아래의 사례처럼 ‘고객 참여’는 무엇보다 중요한 요소 입니다. 고객 참여에는 다양한 방식이 있을 것 입니다. 고객이 바로 옆에서 도움을 줄 수도 있고, CS를 통해서 피드백을 받을 수도 있고, 인터뷰를 진행할 수도 있습니다. 고객이 무엇을 원하는지 알아볼 수 있는 선구안은 정말 흔하지 않기 때문에, 고객 참여를 통해서 니즈를 발견하고 빠르게 개발해나가는 것이 중요하죠.
성숙도가 낮은 조직의 경우 (성숙도 4 이하), 고객 참여 (0.94), 통계적으로 유의미한 실천법 딱 하나입니다. 고객 참여. 그리고 기여도는 0.94로 아까 전체로 볼 때보다 더 높습니다. 거의 1 입니다. 성숙도가 낮아도 고객 참여를 잘하면 프로젝트 성공도가 한 칸 올라간다는 뜻 입니다. … 성숙도가 높은 조직을 보시죠. 짧은 반복 개발 주기가 1등입니다. 고객 참여보다 더 기여도가 높습니다. 그 말은 성숙도가 높은 조직에서는 고객 참여보다 짧은 반복 개발 주기가 성공에 더 도움이 될 수 있다는 뜻입니다. 그만큼 짧은 반복 개발 주기를 통해 고객 참여가 잘 안 될 때를 어느 정도 보완할 수 있다는 뜻일 수도 있겠습니다.
성숙도가 낮다면 고객 참여는 필수 중에서
끝으로
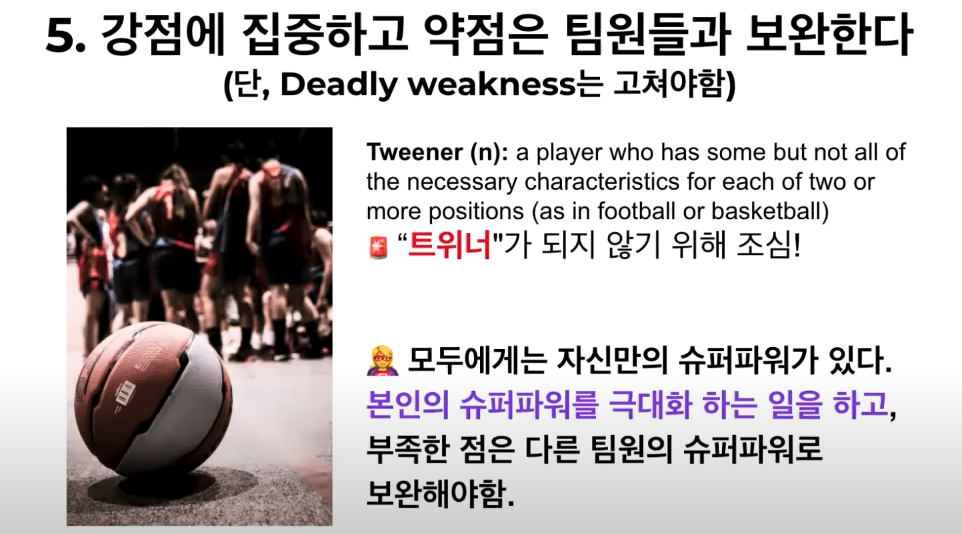
출처: 존잡생각 Ep.18 회사에서 본인을 빠르게 성장시키는 방법 – People Scaling
포스트를 작성하면서 협업에 대해서 생각을 하다보니, 최근에 자주 보고 있는 존잡생각 이라는 샌드버드 CEO인 김동선 대표님의 유투브 채널에서 다뤘던 내용이 생각났습니다. 저 문장이 협업의 측면에서 핵심이 되는 요소라고 생각합니다. 문제가 되는 약점은 고쳐야 하지만, 기본적으로 개개인이 가진 강점을 기반으로 팀으로서의 합이 최대치가 되도록 하는 것이죠.
Im trying to use the MNIST database of handwritten numbers to make a neural network that predicts a number. The issue is that the validation accuracy is very high, around 98%, but when i try to apply the model to numbers outside of the database, the accuracy is very low. I got an accuracy of 50% with a dense network and 60% with a CNN. Im not sure what the issue is or how I can make the network work more consistently with new data that I give it. Any advice would be appreciated. If needed, I can send the code and test images.
I have a self supervised problem, where I have a sequence of web page visits, each of which is denoted by some hash, and I can lookup this has to find a dense vector to represent this page.
I would like to train my model on various self supervised tasks, such as predicting a target page vector, given some context, or predicting the next vector in the sequence.
My question here is what is the best approach for implementation of such a problem? The naive approach would be to prep the data in a separate script.
I feel there must be a better approach, possibly using `tf.data.map` within the pipeline?
Would love to hear some best practices for self supervision, and the creation of datasets using TF and Keras.
The NVIDIA, Facebook, and TensorFlow recommender teams will be hosting a summit with live Q&A to dive into best practices and insights on how to develop and optimize deep learning recommender systems.
The NVIDIA, Facebook, and TensorFlow recommender teams will be hosting a summit with live Q&A to dive into best practices and insights on how to develop and optimize deep learning recommender systems.
Develop and Optimize Deep Learning Recommender Systems Thursday, July 29 at 10 a.m. PT
By joining this Deep Learning Recommender Summit, you will hear from fellow ML engineers and data scientists from NVIDIA, Facebook, and TensorFlow on best practices, learnings, and insights for building and optimizing highly effective DL recommender systems.
Sessions include:
High-Performance Recommendation Model Training at Facebook In this talk, we will first analyze how model architecture affects the GPU performance and efficiency, and also present the performance optimizations techniques we applied to improve the GPU utilization, which includes optimized PyTorch-based training stack supporting both model and data parallelism, high-performance GPU operators, efficient embedding table sharding, memory hierarchy and pipelining.
RecSys2021 Challenge: Predicting User Engagements with Deep Learning Recommender Systems The NVIDIA team, a collaboration of Kaggle Grandmaster and NVIDIA Merlin, won the RecSys2021 challenge. It was hosted by Twitter, who provided almost 1 billion tweet-user pairs as a dataset. The team will present their winning solution with a focus on deep learning architectures and how to optimize them.
Revisiting Recommender Systems on GPU A new era of faster ETL, Training, and Inference is coming to the RecSys space and this talk will walk through some of the patterns of optimization that guide the tools we are building to make recommenders faster and easier to use on the GPU.
TensorFlow Recommenders TensorFlow Recommenders is an end-to-end library for recommender system models: from retrieval, through ranking, to post-ranking. In this talk, we describe how TensorFlow Recommenders can be used to fit and safely deploy sophisticated recommender systems at scale.
Connected cars are vehicles that communicate with other vehicles using backend systems to enhance usability, enable convenient services, and keep distributed software maintained and up to date. At Volkswagen, we are working on connected car with NVIDIA to solve the challenges which have computational inefficiencies like Geospatial Indexing and K-Nearest Neighbors when implemented in native … Continued
Connected cars are vehicles that communicate with other vehicles using backend systems to enhance usability, enable convenient services, and keep distributed software maintained and up to date.
At Volkswagen, we are working on connected car with NVIDIA to solve the challenges which have computational inefficiencies like Geospatial Indexing and K-Nearest Neighbors when implemented in native python and pandas.
Processing driving and sensor data is critical for connected cars to understand their environment. It enables connected cars to perform tasks such as parking spot detection, location-based services, theft protection, route recommendation through real-time traffic, fleet management, and many more. Location information is key to most of these use cases and requires a fast processing pipeline to enable real-time services.
Global sales of connected cars are increasing rapidly, in turn, increasing the amount of data available. As per Gartner, the average connected vehicle will generate 280 petabytes of data annually, with four terabytes of data being generated in a day at the very least. The research also states that around 470 million connected vehicles will be deployed by 2025.
This blog post will focus on the data pipeline required to process location-based geospatial information and deliver necessary services for connected cars.
Challenges with connected cars data
Working with connected car data poses both technical and business challenges:
Fast processing of huge amounts of streaming data is needed because users expect a near real-time experience to make timely decisions. For example, if a user requests a parking spot and the system takes five minutes to respond, it’s likely the spot will already be taken by the time it answers. Faster processing and analyzing of the data is the key factor to overcome this challenge.
There are also data privacy issues to consider. Connected cars must satisfy the General Data Protection Regulation (GDPR). In short, GDPR requires that after data analysis, there should not be a chance to identify individual users from the analyzed data. Additionally, storage of data pertaining to individual users is prohibited (unless written consent is given by the user). Anonymization can meet these requirements by either masking the data that identifies the individual user or by grouping and aggregating the data so that traces of the user are not possible. For this purpose, we need to make sure that the software processing connected car data complies with the regulations required by GDPR on data anonymization, which adds additional compute requirements during the data processing.
Figure 1: Schematic representation of connected cars data challenges.
Taking a data science approach
RAPIDS can address both the technical and business challenges of connected cars. The RAPIDS suite of open-source software (OSS) libraries and APIs gives you the ability to execute end-to-end data science and analytics pipelines entirely on GPUs. Licensed under Apache 2.0, RAPIDS was incubated by NVIDIA and based on extensive hardware and data science experience. RAPIDS utilizes NVIDIA CUDA primitives for low-level compute optimization and exposes GPU parallelism and high-bandwidth memory speed through user-friendly Python interfaces.
In the following sections, we discuss how RAPIDS (software) and NVIDIA GPUs (hardware) help tackle both the technical and business challenges on a prototype application using test data. Two different approaches will be evaluated, geospatial indexing and k-nearest neighbors.
Using RAPIDS, we are able to achieve a 100x speedup for this pipeline.
A brief introduction to geospatial indexing
Geospatial indexing is the basis for many algorithms in the domain of connected cars. It is the process of partitioning areas of the earth into identifiable grid cells. It is an effective way to prune the search space when querying the huge amount of data produced by connected cars.
In this data pipeline example, we use Uber H3 to split the records spatially into a set of smaller subsets.
The following are the conditions, which need to be satisfied after splitting the records into subsets:
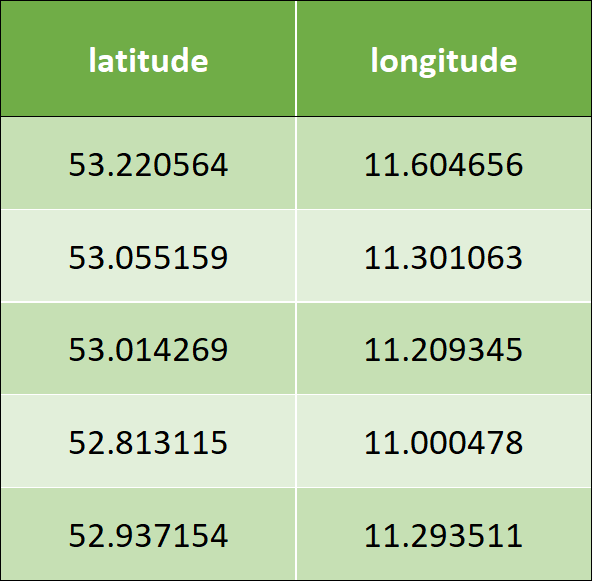
Each subset consists of a maximum of ‘N’ records. This ‘N’ is chosen based on computational capacity constraints. For this experiment, we consider ‘N’ equals 2500 records.
The subset is denoted by subset_id, which is an auto-increment number starting from 0.
The following is the sample input data, which has two columns – latitude and longitude:
Table 1: Sample input data.
The following is the algorithm that needs to be implemented to apply Uber H3 for the use case
Iterate over latitude and longitude, and assign hex_id from resolution 0.
If found any hex_id comprising less than 2500 records, then assign subset_id incrementally starting from 0.
Identify the hex_ids that comprise more than 2500 records.
Split the preceding records with an incremental resolution, which is now 1.
Repeat steps 3 and 4, until all the records are assigned to subset_id & hex_id or until the resolution reaches 15.
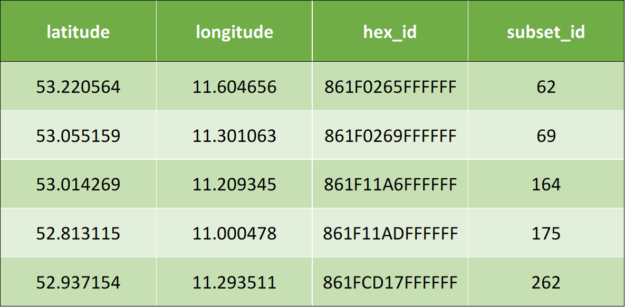
Once the preceding algorithm is applied, it results to the following output data:
Table 2: Sample output data after applying geospatial indexing.
Code snippets of Uber H3 implementation
Following is the code snippet of the implementation of Uber H3 using pandas:
#while loop until all the records are assigned to subset_id
while resolution 16 and df["subset_id"].isnull().any():
#assignment of hex_id
df['hex_id']= df.apply(lambda row: h3.geo_to_h3(row["latitude"],
row["longitude"], resolution), axis = 1)
df_aggreg = df.groupby(by = "hex_id").size().reset_index()
df_aggreg.columns =["hex_id", "value"] #filtering the records that are less than 2500 count
hex_id = df_aggreg[df_aggreg['value']2500]['hex_id']
#assignment of subset_id
for index, value in hex_id.items():
df.loc[df['hex_id']== value, 'subset_id']= subset_id
subset_id += 1
df_return = df_return.append(df[~df['subset_id'].isna()],
ignore_index=True)
df = df[df['subset_id'].isna()]
resolution += 1
Following is the code snippet of the implementation of Uber H3 using PySpark:
#while loop until all the records are assigned to subset_id
while resolution 16 and(len(df.head(1))!= 0):
#assignment of hex_id
df = df.rdd.map(lambda x:(x["latitude"], x["longitude"],
x["subset_id"],h3.geo_to_h3(x["latitude"], x["longitude"],
resolution)))
df = sqlContext.createDataFrame(df, schema)
df_aggreg = df.groupby("hex_id").count()
df_aggreg = df_aggreg.withColumnRenamed("hex_id", "hex_id") .withColumnRenamed("count", "value")
#filtering the records that are less than 2500 count
hex_id = df_aggreg.filter(df_aggreg.value 2500)
var_hex_id =list(hex_id.select('hex_id').toPandas()['hex_id'])for i in var_hex_id:
#assignment of subset_id
df = df.withColumn('subset_id',F.when(df.hex_id==i,subset_id).otherwise(df.subset_id)).select(df.latitude, df.longitude,
'subset_id', df.hex_id)
subset_id += 1
df_return = df_return.union(df.filter(df.subset_id != 0))
df = df.filter(df.subset_id == 0)
resolution += 1
With this pandas implementation of the Uber H3 model, we have identified a painfully slow execution. The slow execution of the code leads to significantly reduced productivity, as only little experiments can be done. The tangible goal is to speed up the execution time by 10x.
To accelerate the pipeline, we follow a step-by-step approach as follows.
Step 1: Simple CPU parallel version
The idea of this version is to implement a simple multiprocessing-based kernel for the H3 library processing. The second part of the processing, which is assigning subsets according to the data, is the pandas library function, which cannot be easily parallelized.
#while loop until all the records are assigned to subset_id
while resolution 16 and df["subset_id"].isnull().any():
#CPU Parallelization
df_chunk = np.array_split(df, n_cores)
pool = Pool(n_cores)
#assigning hex_id by calling the function minikernel()
df_chunk_res=pool.map(partial(minikernel, resolution=resolution),
df_chunk)
df = pd.concat(df_chunk_res)
pool.close()
pool.join()
df_aggreg = df.groupby(by = "hex_id").size().reset_index()
df_aggreg.columns =["hex_id", "value"]
#filtering the records that are less than 2500 count
hex_id = df_aggreg[df_aggreg['value']2500]['hex_id']for index, value in hex_id.items():
#assignment of subset_id is pandas library function
#which cannot be parallelized
df.loc[df['hex_id']== value, 'subset_id']= subset_id
subset_id += 1
df_return = df_return.append(df[~df['subset_id'].isna()],
ignore_index=True)
df = df[df['subset_id'].isna()]
resolution += 1
By applying simple parallelization with a thread pool, we can significantly reduce the first part of the code (H3 library), but the second part (pandas library) is completely single-threaded and extremely slow.
Step 2: Apply RAPIDS cuDF
The idea here is to use as many standard features from cuDF as possible (hence, the slightest code change) to achieve the best performance. As cuDF now operates on CUDA unified memory, it is not simply possible to parallelize the 1st part (H3 library) as cuDF does not handle CPU partitioning. The code is shown below. Note, the following code operates on a cuDF dataframe.
#while loop until all the records are assigned to subset_id
while resolution 16 and df["subset_id"].isnull().any():
#assignment of hex_id
#df is a cuDF
df['hex_id']= np.vectorize(lambda latitude, longitude:
h3.geo_to_h3(latitude, longitude, resolution))(df['latitude'].to_array(), df['longitude'].to_array())
df_aggreg = df.groupby('hex_id').size().reset_index()
df_aggreg.columns =["hex_id", "value"]
#filtering the records that are less than 2500 count
hex_id = df_aggreg[df_aggreg['value']2500]['hex_id']for index, value in hex_id.to_pandas().items():
#assignment of subset_id
df.loc[df['hex_id']== value, 'subset_id']= subset_id
subset_id += 1
df_return = df_return.append(df[~df['subset_id'].isna()],
ignore_index=True)
df = df[df['subset_id'].isna()]
resolution += 1
Step 3: Executing simple CPU parallelism version and cuDF GPU version using larger data
In this step, we increase the data volume three times, from half a million records to 1.5 million records, and execute a simple CPU parallel version and its equivalent cuDF GPU version.
Step 4: One more experiment with a copy to pandas and back to cuDF
As discussed in step 2, cuDF operates on CUDA-unified memory and it is not possible to parallelize the first part (H3 library) due to the lack of CPU-partitioning of the cuDF. Therefore, we have not used the function array_split. To overcome this challenge, first, we converted cuDF to pandas data frame, then applied the function array_split and then converted back the split chunk to cuDF and proceeded further with H3 library processing.
#while loop until all the records are assigned to subset_id
while resolution 16 and df["subset_id"].isnull().any():
#copy to pandas
df_temp = df.to_pandas()
#CPU Parallelization
df_chunk = np.array_split(df_temp, n_cores)
pool = Pool(n_cores)
df_chunk_res=pool.map(partial(minikernel, resolution=resolution),
df_chunk)
pool.close()
pool.join()
df_temp = pd.concat(df_chunk_res)
#Back to cuDF
df = cudf.DataFrame(df_temp)
#assignment of hex_id
df['hex_id']= np.vectorize(lambda latitude, longitude:
h3.geo_to_h3(latitude, longitude, resolution))(df['latitude'].to_array(), df['longitude'].to_array())
df_aggreg = df.groupby('hex_id').size().reset_index()
df_aggreg.columns =["hex_id", "value"]
#filtering the records that are less than 2500 count
hex_id = df_aggreg[df_aggreg['value']2500]['hex_id']for index, value in hex_id.to_pandas().items():
#assignment of subset_id
df.loc[df['hex_id']== value, 'subset_id']= subset_id
subset_id += 1
df_return = df_return.append(df[~df['subset_id'].isna()],
ignore_index=True)
df = df[df['subset_id'].isna()]
resolution += 1
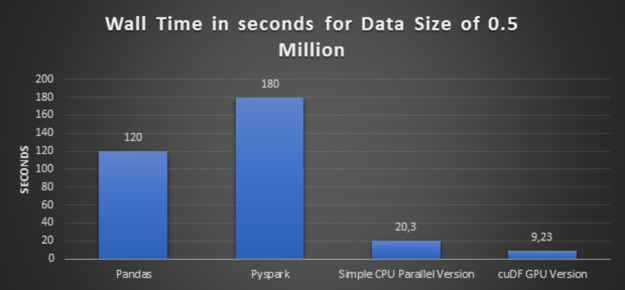
Glancing graph with execution times over all the preceding approaches:
Figure 2: Execution times for various approaches with data size of 0.5 million.
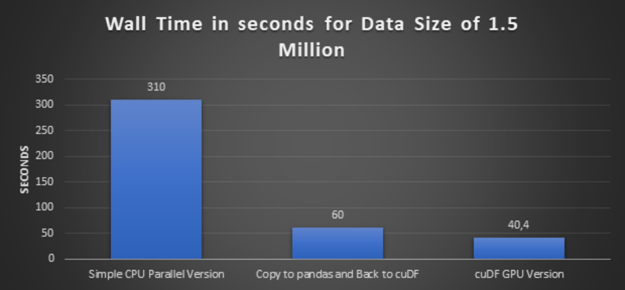
Figure 3: Execution times for various approaches with data size of 1.5 million.
Lessons learned on speed-up geospatial index computation
High-Performance: The conclusion from the preceding glancing graphs is clear that cuDF GPU version delivers the best performance. And also bigger the dataset is, bigger the speedup is.
Code Adaptability and Easy Transition: Please notice that the code being ported is not the best scenario for GPU acceleration. We are running the comparison on a third-party library (Uber H3) which runs on CPU. To make use of that library, we need to copy the data from GPU memory to CPU memory on each loop, which is not the optimal approach. In addition to that, there is a subset_id calculation that is also done in a row-wise approach, which could potentially be speeded up by changing the original code. But still, the code is not changed because one of our main targets is to check code adaptability and easy transition between the libraries pandas and cuDF.
Reusable Code: As you had already observed from the preceding that the pipeline is a set of standardized functions and can just be used as functions to solve other use cases too.
Working towards a CUDA accelerated K-Nearest Neighbors (KNN) classification
Rather than measuring the density of connected cars by means of indexing and grouping, using the scheme above – another way is to perform geographical classification based on the earth distance between two locations.
The classification algorithm of our choice is K-Nearest Neighbors. The principle behind nearest neighbor methods is to find a predefined number of data points (K) closest in distance to the data point. We will be comparing a CPU-based implementation of KNN to the RAPIDS GPU-accelerated version of the same algorithm.
In our current use case, we work with anonymized streamed connected car data (as shortly described in business challenges preceding). Here, grouping and aggregating data using KNN is opted as part of anonymization.
However, for our use case, as we are grouping and aggregating on Geo-Coordinates, we will be using Haversine metric, which is the only metric that can cluster Geo-Coordinates.
In our pipeline inputs to KNN using haversine as distance metric will be the geo-coordinates (latitude, longitude) and the number of desired closest data points. In the example below, K = 7 was to be created.
In the following, we showcase the example with the same data in tuples (longitude and latitude).
Input data are the same tuples (longitude and latitude) as shown in the previous example.
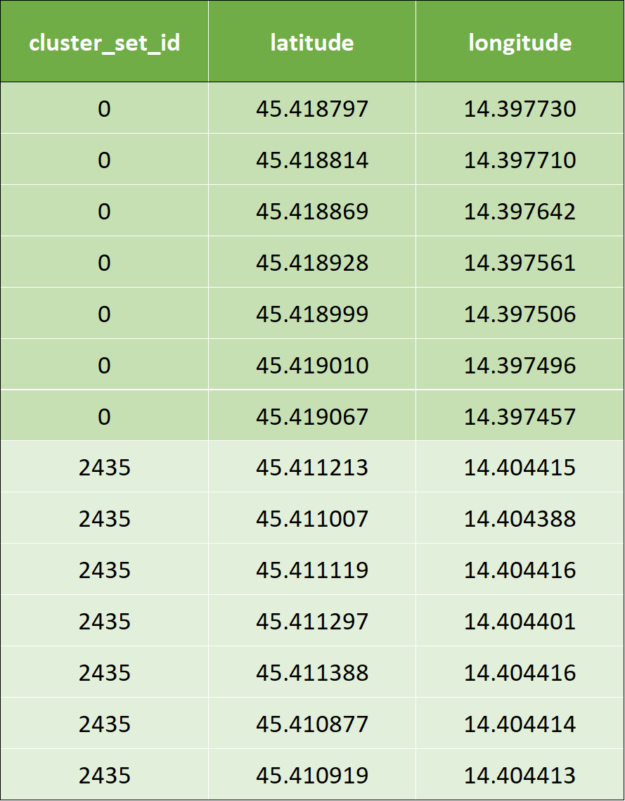
Once KNN is applied, a cluster id is calculated by the KNN algorithm: The clustered output data looks like below for the first two rows of input data. To avoid confusion, we marked the cluster ids with corresponding colors.
Table 3: Sample output data after applying k-nearest neighbors classification.
Following is the code snippet of the implementation of KNN using pandas:
nbrs = NearestNeighbors(n_neighbors=7, algorithm='ball_tree',
metric = "haversine").fit(coord_array_rad)
distances, indices = nbrs.kneighbors(coord_array_rad)
# Distance is computed in radians from haversine
distances_m = earth_radius * distances
# Drop KNN, which are not compliant with minimum distance
compliant_distances_mask =(distances_mKNN_MAX_DISTANCE).all(axis = 1)
compliant_indices = indices[compliant_distances_mask]
KNN is used as a classification algorithm. Drawback of KNN is its computational performance, especially when the data size is large. Our intention is to finally leverage cuML´s KNN implementation.
Preceding implementation worked in pretty small datasets but did not finish processing 3 million records within 1.5 days. Thus we stopped it.
In order to turn towards the CUDA accelerated KNN implementation, we had to mimic the haversine distance with an equivalent metric as shown below.
Step 1: Coordinate transformation to work around Haversine
At the moment of running this exercise, haversine distance metric was not available natively in cuML’s KNN implementation. Therefore, euclidean distance was used instead. Nevertheless, it is fair to mention that the current version of RAPIDS KNN already supports haversine metrics.
First of all, we converted the coordinates into the distance in meters in order to perform a distancing metric calculation. [10] This is implemented through a function named df_geo(), which will be used in the next step.
One caveat of Euclidean distance is that it does not work on coordinates on earth that are further distanced. Rather, it will basically “dig a hole” into the earth’s surface instead of being on the surface of the earth. However, for smaller distances
Step 2: Perform KNN algorithm
By now, we have converted all coordinates into a north-easting coordinate format and in this step, the actual KNN algorithm can be applied.
We used the CUDA accelerated KNN in the following setting. We observe that this implementation performs extremely fast and it is absolutely worthy implementation.
#defining the hyperparameters
n_neighbors = 7
algorithm = "brute"
metric = "euclidean"
#Implementation of kNN by calling df_geo() which converts the coordinates #into Northing and Easting coordinate format
nbrs = NearestNeighbors(n_neighbors=n_neighbors, algorithm=algorithm,
metric=metric).fit(df_geo[['northing', 'easting']])
distances, indices = nbrs.kneighbors(df_geo[['northing', 'easting']])
Step 3: Perform the distance masking and filtering
This part is done on the CPU again because no significant speedup is expected on the GPU.
distances = cp.asnumpy(distances.values)
indices = cp.asnumpy(indices.values)
#running on CPU
KNN_MAX_DISTANCE = 10000 # meters
# Drop KNN, which are not compliant with minimum distance
compliant_distances_mask =(distances KNN_MAX_DISTANCE).all(axis = 1)
compliant_indices = indices[compliant_distances_mask]
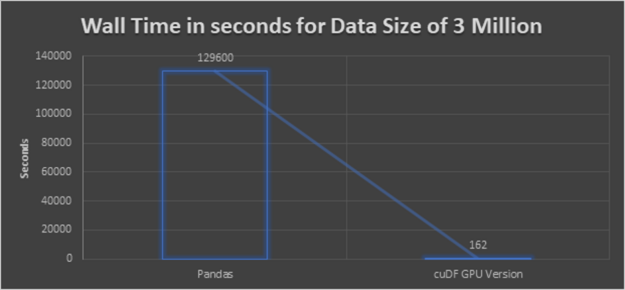
Our result is a speedup of 800x when applied to a dataset with 3 million samples over the naive pandas implementation.
Figure 4: Execution time for various approaches with data size of 3 million.
Lessons learnt for K-Nearest Neighbors (KNN) clustering
High-Performance: The conclusion from the preceding glancing graph is clear that, cuDF GPU version delivers the best performance. Even though the dataset is bigger, the execution will not take a long time like in CPU executions.
Comparing KNN from cuML and scikit: The cuML based implementation is lightning fast. But we had to go the extra mile to mimic the missing distance metric. It was absolutely worth doing more than required given the performance boost achieved. In the meantime, the haversine distance is supported in RapidsAI and comes at the same convenience as the scikit implementation. We overcome the missing haversine distance by using the Euclidean distance with Northing-Easting Approach. As per the research “Over fairly large distances–perhaps up to a few thousand kilometers or more, Euclidean starts erroneous calculation” In our code, we are limiting the distance to 10 Kilometers. By using Northing-Easting, we first needed to convert the coordinates. As the overall performance is much better, we can accept the time taken for converting the coordinates.
Code Adaptability and Easy Transition: Except the Northing-Easting function.
The remaining code is similar to CPU code and still achieved better performance. We had not changed the code because one of our main targets is also to check code adaptability and easy transition between the libraries pandas and cuDF.
Reusable Code: As you already observed from the preceding, pipeline is a set of standardized functions and can be used as functions to solve other use cases too.
Summary
This article summarized how RAPIDS helps in accelerating data pipelines 100x faster by evaluating it over two models, namely Geospatial Indexing (Uber H3) and K-Nearest Neighbors Classification (KNN). Furthermore, we analyzed the advantages and disadvantages of NVIDIA RapidsAI with respect to the preceding two models with many criteria like performance, code adaptability, and reusability. We conclude that RAPIDS is surely a technology for streaming data processing (connected car data). It provides the benefits of faster processing of data which is the crucial factor for streaming data analysis. Also, RAPIDS has a large number of machine learning algorithms supported. The API’s of accelerated RAPIDS cuDF and cuML libraries kept similar to pandas to enable the easy transition. It is very easy to transform existing ML pipelines and make them benefit from cuDF and cuML.
When to choose RAPIDS over standard Python and pandas:
When the application requires faster processing of data.
If you are sure that the code gives benefits on running in GPU over CPU.
If the recommended algorithms are available as part of cuML.
This article aims at automotive engineers, data engineers, big data architects, project managers, and industry consultants interested in exploring or dealing with the possibilities of data science and using Python to analyze data.
NVIDIA and King’s College London today unveiled new details about one of the first projects on Cambridge-1, the United Kingdom’s most powerful supercomputer.
King’s College London, along with partner hospitals and university collaborators, unveiled new details today about one of the first projects on Cambridge-1, the United Kingdom’s most powerful supercomputer. The Synthetic Brain Project is focused on building deep learning models that can synthesize artificial 3D MRI images of human brains. These models can help scientists understand … Continued
King’s College London, along with partner hospitals and university collaborators, unveiled new details today about one of the first projects on Cambridge-1, the United Kingdom’s most powerful supercomputer.
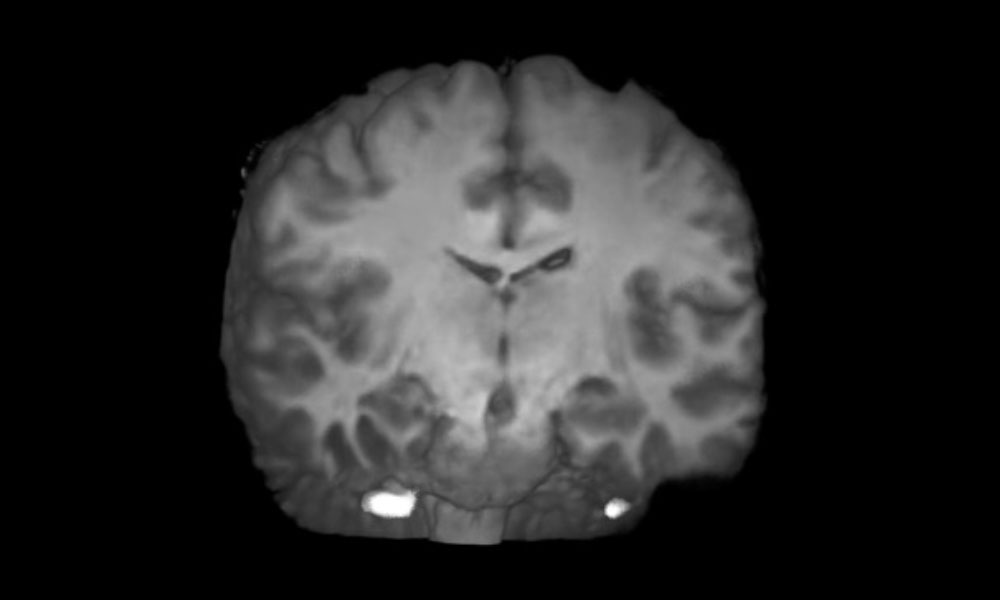
The Synthetic Brain Project is focused on building deep learning models that can synthesize artificial 3D MRI images of human brains. These models can help scientists understand what a human brain looks like across a variety of ages, genders, and diseases.
The AI models were developed by King’s College London, and NVIDIA data scientists and engineers, as part of The London Medical Imaging & AI Centre for Value Based Healthcare. The research was funded by UK Research and Innovation and a Wellcome Flagship Programme (in collaboration with University College London).
The aim of developing the AI models is to help diagnose neurological diseases based on brain MRI scans. They also could be used for predicting diseases a brain may develop over time, enabling preventative treatment.
The use of synthetic data has the additional benefit of ensuring patient privacy and gives King’s the ability to open the research to the broader UK healthcare community. Without Cambridge-1, the AI models would have taken months rather than weeks to train, and the resulting image quality would not have been as clear.
King’s and NVIDIA researchers used Cambridge-1 to scale the models to the necessary size using multiple GPUs, and then applied a process known as hyperparameter tuning, which dramatically improved the accuracy of the models.
“Cambridge-1 enables accelerated generation of synthetic data that gives researchers at King’s the ability to understand how different factors affect the brain, anatomy, and pathology,” said Jorge Cardoso, senior lecturer in Artificial Medical Intelligence at King’s College London. “We can ask our models to generate an almost infinite amount of data, with prescribed ages and diseases; with this, we can start tackling problems such as how diseases affect the brain and when abnormalities might exist.”
Introduction of the NVIDIA Cambridge-1 supercomputer poses new possibilities for groundbreaking research like the Synthetic Brain Project and could be used to accelerate research in digital biology on disease, drug design, and the human genome.
As one of the world’s top 50 fastest supercomputers, Cambridge-1 is built on 80 DGX A100 systems, integrating NVIDIA A100 GPUs, Bluefield-2 DPUs, and NVIDIA HDR InfiniBand networking.
King’s College London is leveraging NVIDIA hardware and the open-source MONAI software framework supported by PyTorch, with cuDNN and Omniverse for their Synthetic Brain Project. MONAI is a freely available, community-supported PyTorch-based framework for deep learning in healthcare imaging. The CUDA Deep Neural Network library (cuDNN) is a GPU-accelerated library for deep neural networks. Omniverse is an open platform for virtual collaboration and real-time simulation. King’s has just begun using it to visualize brains, which can help physicians better understand the morphology and pathology of brain diseases.
The increasing efficiency of deep learning architectures—together with hardware improvements—have enabled complex and high-dimensional modelling of medical volumetric data at higher resolutions. Vector-Quantized Variational Autoencoders (VQ-VAE) have been an option for an efficient generative unsupervised learning approach that can encode images to a substantially compressed representation compared to its initial size, while preserving the decoded fidelity.
King’s used a VQ-VAE inspired and 3D optimized network to efficiently encode a full-resolution brain volume, compressing the data to less than 1% of the original size while maintaining image fidelity, and outperforming the previous State-of-the-Art.
A synthetic healthy human brain generated by King’s College London and NVIDIA AI models.
After the images are encoded by the VQ-VAE, the latent space is learned through a long-range transformer model optimized for the volumetric nature of the data and associated sequence length. The sequence length caused by the three-dimensional nature of the data requires unparalleled model sizes made possible by the multi-GPU and multinode scaling provided by Cambridge-1.
By sampling from these large transformer models, and conditioning on clinical variables of interest (such as age or disease), new latent space sequences can be generated, and decoded into volumetric brain images using the VQ-VAE. Transformer AI models adopt the mechanism of attention, differentially weighing the significance of each part of the input data, and used to understand these sequence lengths.
Creating generative brain images that are eerily similar to real life neurological radiology studies helps understand how the brain forms, how trauma and disease affect it, and how to help it recover. Instead of real patient data, the use of synthetic data mitigates problems with data access and patient privacy.
As part of the synthetic brain generation project from King’s College London, the code and models are open-source. NVIDIA has made open-source contributions to improve the performance of the fast-transformers project, on which The Synthetic Brain Project depends upon.
To learn more about Cambridge-1, watch the replay of the Cambridge-1 Inauguration featuring a special address from NVIDIA founder and CEO Jensen Huang, and a panel with UK healthcare experts from AstraZeneca, GSK, Guy’s and St Thomas’ NHS Foundation Trust, King’s College London and Oxford Nanopore.
Currently trying to convert a TF mask rcnn model to TFLite, so I can use it on a TPU. When I try to run the quantization code, I get the following error:
error: 'tf.TensorListReserve' op requires element_shape to be 1D tensor during TF Lite transformation pass
I’m not sure how to deal with the error, or how to fix it. Here’s the code:
import tensorflow as tf import model as modellib import coco import os import sys # Enable eager execution tf.compat.v1.enable_eager_execution() class InferenceConfig(coco.CocoConfig): GPU_COUNT = 1 IMAGES_PER_GPU = 1 config = InferenceConfig() model = modellib.MaskRCNN(mode="inference", model_dir='logs', config=config) model.load_weights('mask_rcnn_coco.h5', by_name=True) model = model.keras_model tf.saved_model.save(model, "tflite") # Preparing before conversion - making the representative dataset ROOT_DIR = os.path.abspath("../") CARS = os.path.join(ROOT_DIR, 'Mask_RCNN\mrcnn\smallCar') IMAGE_SIZE = 224 datagen = tf.keras.preprocessing.image.ImageDataGenerator(rescale=1./255) def representative_data_gen(): dataset_list = tf.data.Dataset.list_files(CARS) for i in range(100): image = next(iter(dataset_list)) image = tf.io.read_file(image) image = tf.io.decode_jpeg(image, channels=3) image = tf.image.resize(image, [IMAGE_SIZE, IMAGE_SIZE]) image = tf.cast(image / 255., tf.float32) image = tf.expand_dims(image, 0) yield [image] converter = tf.lite.TFLiteConverter.from_keras_model(model) # This enables quantization converter.optimizations = [tf.lite.Optimize.DEFAULT] # This sets the representative dataset for quantization converter.representative_dataset = representative_data_gen # This ensures that if any ops can't be quantized, the converter throws an error converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS_INT8] # For full integer quantization, though supported types defaults to int8 only, we explicitly declare it for clarity. converter.target_spec.supported_types = [tf.int8] # These set the input and output tensors to uint8 (added in r2.3) converter.inference_input_type = tf.uint8 converter.inference_output_type = tf.uint8 tflite_model = converter.convert() with open('modelQuantized.tflite', 'wb') as f: f.write(tflite_model)
When I try to run the training process of my neural network on my GPU, I get these errors:
W tensorflow/stream_executor/platform/default/dso_loader.cc:64] Could not load dynamic library 'cudnn64_8.dll'; dlerror: cudnn64_8.dll not found W tensorflow/core/common_runtime/gpu/gpu_device.cc:1766] Cannot dlopen some GPU libraries. Please make sure the missing libraries mentioned above are installed properly if you would like to use GPU. Follow the guide at https://www.tensorflow.org/install/gpu for how to download and setup the required libraries for your platform. Skipping registering GPU devices...
I have followed all the steps in the GPU installation guide. I have downloaded the latest Nvidia GPU driver which is compatible with my graphic card. I have also downloaded the CUDA tool kit as well as the cuDNN packages. I have also made sure to add the directories of the cuDNN C:cudabin, C:cudainclude, C:cudalibx64 folders as variables in the PATH environment. I also checked that the file cudnn64_8.dll exists, which it does in cudalibx64.
I just started learning Tensorflow/Keras and in this paper it says “We use SGD with momentum of 0.9 to optimize for sum-squared error in the output of our model and use a learning rate of 0.0001 and a weight decay of 0.0001 to train for 5 epochs.” I’m trying to implement that and I have this now


 The NVIDIA, Facebook, and TensorFlow recommender teams will be hosting a summit with live Q&A to dive into best practices and insights on how to develop and optimize deep learning recommender systems.
The NVIDIA, Facebook, and TensorFlow recommender teams will be hosting a summit with live Q&A to dive into best practices and insights on how to develop and optimize deep learning recommender systems. Connected cars are vehicles that communicate with other vehicles using backend systems to enhance usability, enable convenient services, and keep distributed software maintained and up to date. At Volkswagen, we are working on connected car with NVIDIA to solve the challenges which have computational inefficiencies like Geospatial Indexing and K-Nearest Neighbors when implemented in native …
Connected cars are vehicles that communicate with other vehicles using backend systems to enhance usability, enable convenient services, and keep distributed software maintained and up to date. At Volkswagen, we are working on connected car with NVIDIA to solve the challenges which have computational inefficiencies like Geospatial Indexing and K-Nearest Neighbors when implemented in native … 
 King’s College London, along with partner hospitals and university collaborators, unveiled new details today about one of the first projects on Cambridge-1, the United Kingdom’s most powerful supercomputer. The Synthetic Brain Project is focused on building deep learning models that can synthesize artificial 3D MRI images of human brains. These models can help scientists understand …
King’s College London, along with partner hospitals and university collaborators, unveiled new details today about one of the first projects on Cambridge-1, the United Kingdom’s most powerful supercomputer. The Synthetic Brain Project is focused on building deep learning models that can synthesize artificial 3D MRI images of human brains. These models can help scientists understand …