
 This post-dive into how the NVIDIA
This post-dive into how the NVIDIA
Triton Inference Server offers highly optimized real-time serving forest models by using the Forest Inference Library backend.
The success of deep neural networks in multiple areas has prompted a great deal of thought and effort on how to deploy these models for use in real-world applications efficiently. However, efforts to accelerate the deployment of tree-based models (including random forest and gradient-boosted models) have received less attention, despite their continued dominance in tabular data analysis and their importance for use-cases where interpretability is essential.
As organizations like DoorDash and CapitalOne turn to tree-based models for the analysis of massive volumes of mission-critical data, it has become increasingly important to provide tools to help make deploying such models easy, efficient, and performant.
NVIDIA Triton Inference Server offers a complete solution for deploying deep learning models on both CPUs and GPUs with support for a wide variety of frameworks and model execution backends, including PyTorch, TensorFlow, ONNX, TensorRT, and more. Starting in version 21.06.1, to complement NVIDIA Triton Inference Server existing deep learning capabilities, the new Forest Inference Library (FIL) backend provides support for tree models, such as XGBoost, LightGBM, Scikit-Learn RandomForest, RAPIDS cuML RandomForest, and any other model supported by Treelite.
Based on the RAPIDS Forest Inference Library (FIL), the NVIDIA Triton Inference Server FIL backend allows users to take advantage of the same features of the NVIDIA Triton Inference Server they use to achieve optimal throughput/latency for deep learning models to deploy tree-based models on the same system.
In this post, we’ll provide a brief overview of the NVIDIA Triton Inference Server itself then dive into an example of how to deploy an XGBoost model using the FIL backend. Using NVIDIA GPUs, we will see that we do not always have to choose between deploying a more accurate model or keeping latency manageable.
In the example notebook, by taking advantage of the FIL backend’s GPU-accelerated inference on an NVIDIA DGX-1 server with eight V100 GPUs, we’ll be able to deploy a much more sophisticated fraud detection model than we would be able to on CPU while keeping p99 latency under 2ms and still offer over 400K inferences per second (630 MB/s) or about 20x higher throughput than on CPU.
NVIDIA Triton Inference Server
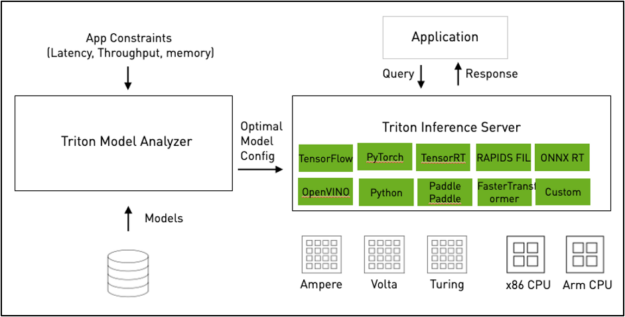
NVIDIA Triton Inference Server offers a complete open source solution for real-time serving of machine learning models. Designed to make the process of performant model deployment as simple as possible, NVIDIA Triton Inference Server provides solutions to many of the most common problems encountered when attempting to deploy ML algorithms in real-world applications, including:
- Multi-Framework Support: Supports all of the most common deep learning frameworks and serialization formats, including PyTorch, TensorFlow, ONNX, TensorRT, OpenVINO, and more. With the introduction of the FIL backend, NVIDIA Triton Inference Server also provides support for XGBoost, LightGBM, Scikit-Learn/cuML RandomForest, and Treelite-serialized models from any framework.
- Dynamic Batching: Allows users to specify a batching window and collate any requests received in that window into a larger batch for optimized throughput.
- Multiple Query Types: Optimizes inference for multiple query types: real time, batch, streaming, and also supports model ensembles.
- Pipelines and Ensembles: Models deployed with NVIDIA Triton Inference Server can be connected in sophisticated pipelines or ensembles to avoid unnecessary data transfers between client and server or even host and device.
- CPU Model Execution: While most users will want to take advantage of the substantial performance gains offered by GPU execution, NVIDIA Triton Inference Server allows you to run models on either CPU or GPU to meet your specific deployment needs and resource availability.
- Customization: If NVIDIA Triton Inference Server does not provide support for part of your pipeline, or if you need specialized logic to link together various models, you can add precisely the logic you need with a custom Python or C++ backend.
- Run anywhere: On scaled-out cloud or data center, enterprise edge, and even on embedded devices. It supports both bare metal and virtualized environments (e.g. VMware vSphere) for AI inference.
- Kubernetes and AI platform support:
- Available as a Docker container and integrates easily with Kubernetes platforms like AWS EKS, Google GKE, Azure AKS, Alibaba ACK, Tencent TKE or Red Hat OpenShift.
- Available in Managed CloudAI workflow platforms like Amazon SageMaker, Azure ML, Google Vertex AI, Alibaba Platform for AI Elastic Algorithm Service, and Tencent TI-EMS.
- Enterprise support: NVIDIA AI Enterprise software suite includes full support of NVIDIA Triton Inference Server, such as access to NVIDIA AI experts for deployment and management guidance, prioritized notification of security fixes and maintenance releases, long term support (LTS) options and a designated support agent.
To get a better sense of how we can take advantage of some of these features with the FIL backend for deploying tree models, let’s look at a specific use case.
Example: Fraud Detection with the FIL Backend
In order to deploy a model in NVIDIA Triton Inference Server, we need a configuration file specifying some details about deployment options and the serialized model itself. Models can currently be serialized in any of the following formats:
- XGBoost binary format
- XGBoost JSON
- LightGBM text format
- Treelite binary checkpoint files
In the following notebook, we will walk through every step of the process for deploying a fraud detection model, from training the model to writing the configuration file and optimizing the deployment parameters. Along the way, we’ll demonstrate how GPU deployments can dramatically increase throughput while keeping latency to a minimum. Furthermore, since FIL can easily scale up to very large and sophisticated models without substantially increasing latency, we’ll see that it is possible to deploy a much more complex and accurate model on GPU than on CPU for any given latency budget.
Notebook:
As we can see in this notebook, the FIL backend for NVIDIA Triton Inference Server allows us to easily serve tree models with just the serialized model file and a simple configuration file. Without NVIDIA Triton Inference Server, those wishing to serve XGBoost, LightGBM, or Random Forest models from other frameworks have often resorted to hand-rolled Flask servers with poor throughput-latency performance and no support for multiple frameworks. NVIDIA Triton Inference Server’s dynamic batching and concurrent model execution automatically maximizes throughput and Model Analyzer helps in choosing the most optimal deployment configuration. Manual selection can take hundreds of combinations and can delay the model rollout. With the FIL backend, we can serve models from all of these frameworks alongside each other with no custom code and highly optimized performance.
Conclusion
With the FIL backend, the NVIDIA Triton Inference Server now offers a highly optimized real-time serving of forest models, either on their own or alongside deep learning models. While both CPU and GPU executions are supported, we can take advantage of GPU-acceleration to keep latency low and throughput high even for complex models. As we saw in the example notebook, this means that there is no need to compromise model accuracy by falling back to a simpler model, even with tight latency budgets.
If you would like to try deploying your own XGBoost, LightGBM, Sklearn, or cuML forest model for real-time inference, you can easily pull the NVIDIA Triton Inference Server Docker container from NGC, NVIDIA’s catalog of GPU-optimized AI software. You can find everything you need to get started in the FIL backend documentation. NVIDIA Triton also offers example Helm charts if you’re ready to deploy to a Kubernetes cluster. For enterprises looking to trial Triton Inference Server with real-world workloads, the NVIDIA LaunchPad program offers a set of curated labs using Triton in the NVIDIA AI Enterprise suite.
If you run into any issues or would like to see additional features added, please do let us know through the FIL backend issue tracker. You can also contact the RAPIDS team through Slack, Google Groups, or Twitter.
Lastly, NVIDIA is hosting its GPU Technology Conference (GTC) this March. The event is virtual, developer-focused, and free to attend. There are numerous technical sessions and a training lab discussing the NVIDIA Triton Inference Server FIL backend use cases and best practices. Register today!



 For IT administrators, remote access to all of their machines reduces the time and effort spent on urgent fixes and provides peace-of-mind in the case of emergencies or major issues.
For IT administrators, remote access to all of their machines reduces the time and effort spent on urgent fixes and provides peace-of-mind in the case of emergencies or major issues. 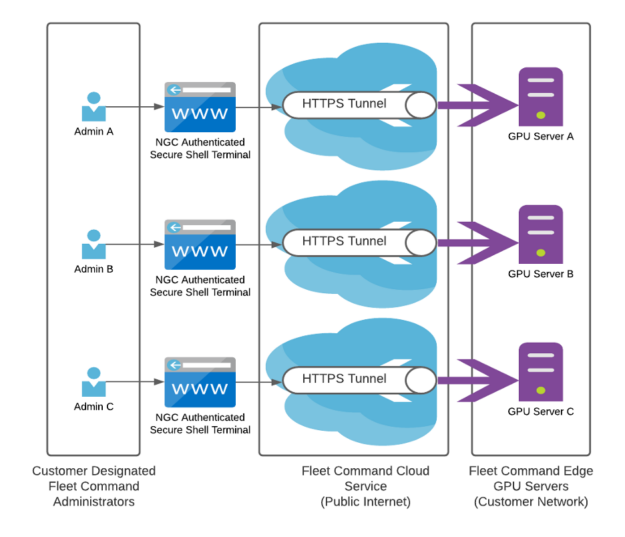




 Dive into the Omniverse Code app—an integrated development environment for users to easily build their own Omniverse extensions, apps, or microservices.
Dive into the Omniverse Code app—an integrated development environment for users to easily build their own Omniverse extensions, apps, or microservices.
{kind=link}
{kind=link}
{kind=link}
{kind=link}