Learn how building models with NVIDIA Data Science Workbench can improve management and increase productivity.
Data scientists wrestle with many challenges that slow development. There are operational tasks, including software stack management, installation, and updates that impact productivity. Reproducing state-of-the-art assets can be difficult as modern workflows include many tedious and complex tasks. Access to the tools you need is not always fast or convenient. Also, the use of multiple tools and CLIs adds complexity to the data science lifecycle.
Master your Data Science environment
Building data science models is easier said than done. That’s why we are announcing NVIDIA Data Science Workbench to simplify and orchestrate tasks for data scientists, data engineers, and AI developers. Using a GPU-enabled mobile or desktop workstation, users can easily manage the software development environment for greater productivity and ease-of-use while quickly reproducing state-of-the-art examples to accelerate development. Through Workbench, key assets are just a click away.
Figure 1: NVIDIA Data Science Workbench and Enterprise Data Science Stack.
Workbench enhances the development experience in several ways:
Better management
Easily set up your work environment and manage NVIDIA Data Science Stack software versions. Access tools that provide optimized frameworks for GPU accelerated performance as well as automatic driver, CUDA, nv-docker, and NGC container updates. Also, get notified about other important updates.
Easy reproducibility
Build quality models faster based on state-of-the-art example code. Dockerize GitHub content and reproduce assets for your Jupyter environment. Use NGC the container for GPU-optimized code that also runs in AWS.
Greater productivity
Easy software and driver installation, quickly access the Jupyter notebook, software assets, Kaggle notebooks, GitHub, and more. Use NGC containers for GPU-optimized code that also runs in AWS.
Try Workbench
The released version for Ubuntu 18.04 and 20.04 is now available. Click here for installation instructions. Also, watch this 90-second Workbench demo:
Video 1: The video shows Workbench as a desktop application and illustrates NGC, Kaggle, and various data science tools and assets are easily accessed.
“I installed the NVIDIA Data Science Workbench and quickly discovered that it was easy to reproduce Git content and download NGC containers for use in Jupyter. I was pleasantly surprised to learn that Workbench installs a data science software environment for you as well as addressing updates – which is usually a big hassle and a big consumption of time. I’d expect Workbench will become a popular tool for anyone building deep-learning models and other data science projects.”
Dr. Chanin Nantasenamat Associate Professor of Bioinformatics at Mahidol University Founder of Data Professor YouTube Channel
Attend our session at the NVIDIA GTC Conference to learn more about Workbench. GTC registration is required (registration is free).
Date and Time: November 11, 2021 at 3:00am – 3:50am Pacific Time (on-demand afterward)
Workbench – your personal assistant
NVIDIA Data Science Workbench can make you more productive by providing a convenient framework on workstations for building models that use best practices. Workbench will run on most GPU-enabled workstations, but NVIDIA-Certified Workstations are recommended. In the end, it’s easier to manage, reproduce, and leverage NGC, Kaggle, and Conda for helpful assets.
Workbench won’t build your code for you, but it will accelerate development, reduce confusion, and help deliver better quality models in less time. To learn more, read the Workbench webpage, or visit the Workbench forum.
NVIDIA announced the latest release in Nsight Graphics, which supports Direct3D, Vulkan, OpenGL, OpenVR, and the Oculus SDK.
Today, NVIDIA announced Nsight Graphics 2021.5, the latest release, which supports Direct3D (11, 12, and DXR), Vulkan (1.2, NV Vulkan Ray Tracing Extension), OpenGL, OpenVR, and the Oculus SDK. Nsight Graphics is a standalone developer tool that enables you to debug, profile, and export frames built with high-fidelity 3D graphics applications.
Key features:
Full Windows 11 support for both API Capture and Tracing.
Acceleration Structure Viewer with Bounding Volume Overlap Analysis.
Users are able to specify the continual refresh flag via the Nsight API.
Support for Linux NGX.
Developers now have full support for Windows 11 for all activities, including Frame Profiling and GPU Trace profiling. The Acceleration Structure Overlap Analyzer is a noteworthy addition to this release as it helps to ensure that NVIDIA RTX ray tracing applications are efficiently traversing bounding volumes in your scene. This has direct implications on performance, making it an important feature for anyone looking to optimize their ray tracing applications.
Technical overview of the Nsight DL Designer tool to help ease the process of performant model design.
NVIDIA Nsight Deep Learning Designer is a new tool that helps ease the process of performant model design. DL Designer provides valuable insights into the structure of the model, and how well it performs on NVIDIA hardware. Models can be created with a user-friendly, drag-and-drop interface that features nodes for all of the commonly used operators available in the most popular deep learning frameworks.
Performance profiling
Understanding the performance characteristics of a model is essential right from the outset. After the model is designed, you can profile it for performance.
To select and view the latest profiling report, choose Launch Inference, View, Inference Run Logger.
This is divided into two major sections. The first, shown previously, gives you a table of operators, their hyperparameters, and execution times. These are, by default, listed in order of priority to optimize (akin to how nvprof lists kernels in order of optimization priority).
An important question for any model running on NVIDIA hardware, for both training and inference is, “Is this model using Tensor Cores”? The second part of the profiling report shows the utilization of Tensor Cores.
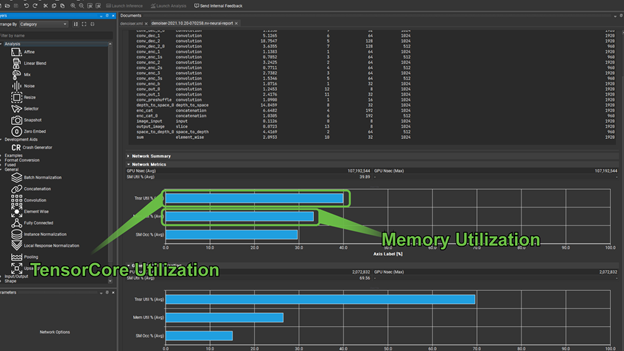
There are two groups of graphs here, the first gives you the Tensor Core utilization, along with memory throughput, and SM occupancy for the entire network. The second gives these same metrics for an individually selected operator from the preceding list. In cases where Tensor Core utilization is not meaningful, for example in the case of a pooling operator, the Tensor Core utilization shows as zero.
Memory utilization can quickly tell you if you are memory-bound. In cases such as this, it is prudent to look for opportunities to fuse operators where appropriate to use faster memory. Training time can be hugely reduced if you use the GPU hardware effectively. When training large models, or using cloud-based services, this can quickly translate into greatly reduced production costs.
Training the model
After you have profiled your model for performance improvements, you can export the model to PyTorch and perform training. Improvement areas can include ensuring FP16, when NHWC layout is used and you have at least multiples of eight input/output channels for your conv2d convolutions.
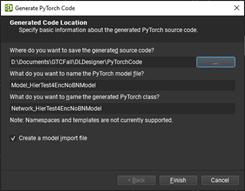
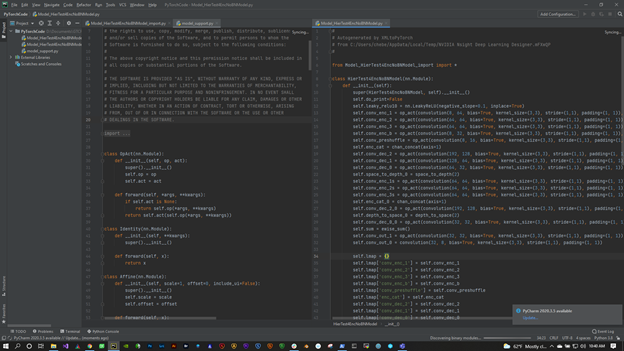
To export to PyTorch, choose File, Export, Generate PyTorch Files (Figure 3).
Figure 3. Generating PyTorch code from DL Designer
Exporting your model to PyTorch gives you a few options to check the names of the model, and files that are selected for you. But, you must specify an output directory for your PyTorch files, which consists of a trainable model and some utility methods to work with it.
To export to PyTorch, you must have a Python 3 environment in your PATH environment variable and the following modules:
PyTorch
Numpy
Pillow
Matplotlib
Fastprogress
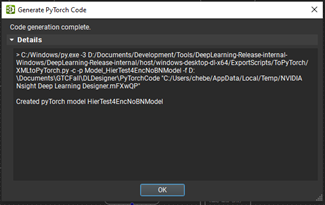
Upon successful generation, close the Code generation complete dialog box.
Figure 4. Completing your PyTorch code generation step.
Analyzing the model
Figure 5. Training model and applying weights to analyze performance.
Now your code is ready to work with! The next step is to get it trained and the weights loaded back into DL Designer so that you can analyze how well the model is performing the task for which it was designed.
The model here is a denoiser model. It is in the samples that you can try for yourself. The first thing to do is load it into DL Designer. Next get and apply the weights that you got from the training in PyTorch.
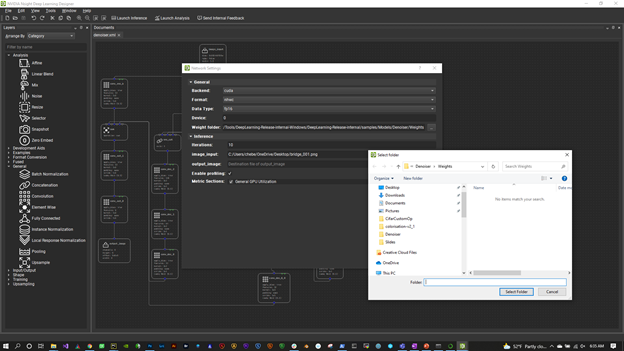
To configure the trained model, choose Tools, Network Settings.
Figure 6. Network Settings
The first thing to look at is the Weights Folder. Select the directory where you output your trained weights. DL Designer picks these up and applies them to the appropriate operators.
Also, make sure that you are set to FP16, NHWC layout, and the CUDA backend. To use the fast Tensor Cores for operations such as convolutions and GEMMs (matrix multiplications), use FP16. To get the fastest throughput, use NHWC.
Now, you can begin performing some visual analysis on the model. Before you do that, use some of the DL Designer analysis features and add a few handy nodes to the trained model to help you evaluate its performance as a denoiser.
Analysis layers
Figure 7. View of the Analysis section of the Layers palette.
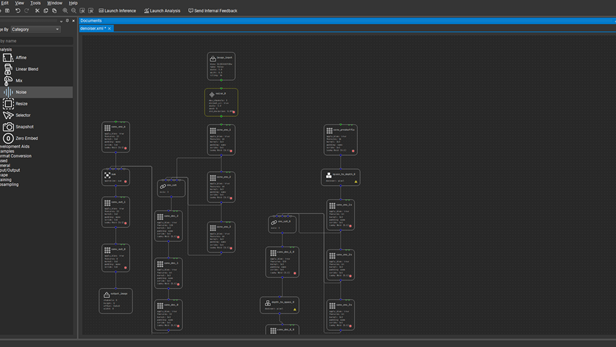
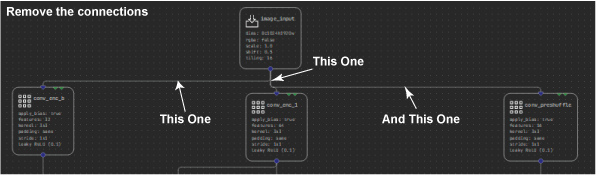
Start by expanding the Analysis section of the Layers palette. The first new layer to add is the Noise layer. This helps you inject some noise into the input image, so that you can evaluate how well the denoiser is reconstructing the image without it. To do this, first select and delete the connections between Input_image and the three nodes it connects with: conv_enc_b, conv_enc_1, and conv_preshuffle.
Figure 8. Adding a Noise layer to test the denoiser.
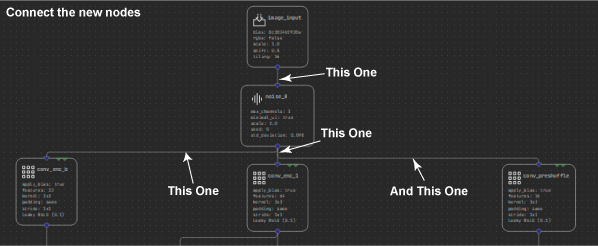
Now select and shift the image input node up a touch so that you can fit the noise layer in between. Finally, connect the input _image node to the new Noise layer, then connect the new layer to the three nodes that were previously connected from the image input. When you run this model, you can control how much noise to add to the image.
Figure 9. Connecting the Noise layer to the three nodes connected to input_image.
Before you run the analysis, there is one more node that you might find useful: the Mix node. This node enables you to compare the final denoised output with the original input, before the noise was added. As you see, you can perform this comparison in a variety of ways that give you a good idea as to how well your model is performing.
Delete the connection between conv_out_0 and output_image and then insert the Mix node in between these two, much like you did with the noise node by replacing the connections. I recommend caution as the mix node actually has two inputs.
You have already specified conv_out_0 as one input. Now add the other input to connect to the output of the original image layer, right at the top of the model, before you add the noise.
So far, you’ve added handy utilities to help analyze the model. At this point, save your model as denoiser_analyze.xml (or something similar) and choose Launch Analysis to see the model in action. Here is a quick breakdown of the user interface:
image_input_data—Right-click and choose Open Image Input to browse for a JPG or PNG file for use as the original input. When you choose Ok, the model springs into life and the output of the model is displayed in the central panel.
Noise and Mix—Options for the two analysis layers just added.
Network overview—The graph of nodes as they are being executed by the model inference.
Customizing design inspection
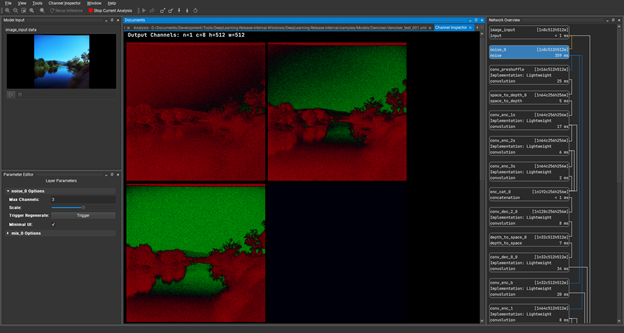
To continue, double-click on the Noise layer, which is the second layer down under Network Overview. Through the Channel Inspector under this tab, you can see the individual channels of the tensors that are produced during inference, which are the hidden layers. With the Noise layer channels in view, you can now go back to the noise layer options at the bottom right of the screen. Drag the Scale slider a little to the right and see the amount of noise showing on the image input increase.
Figure 10. Using the Channel Inspector feature to identify and distinguish individual channels of the tensors produced during inference
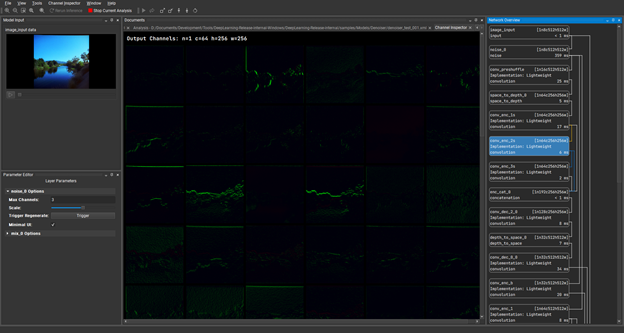
Under Channel Inspector, double-click the conv_enc_2s layer and load the channels of that hidden layer. This is showing the results of the convolution operation at the point during inference.
Figure 11. Channel inspector loading hidden layers as a result of a convolution operation at the point during inference
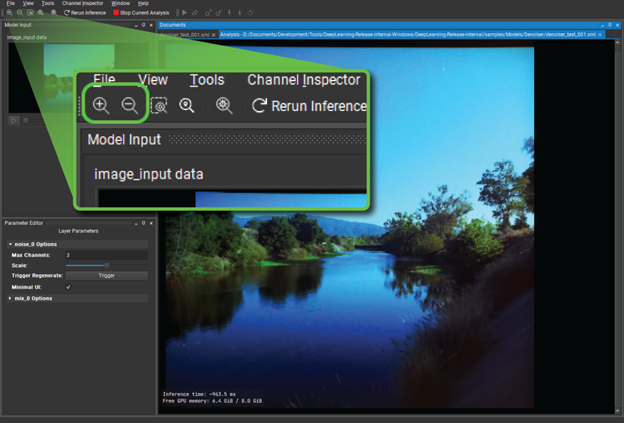
The features in these channels are a little faint, but you can boost them a bit by choosing the scale up icon (Figure 12).
Figure 12. Scaling up or down the channel brightness
This gives you a better idea of how these layers are performing and you can see clearly that there is nothing collapsing here. You have got strong signals propagating through the model. Any data displayed as green is positive in value and any data displayed as red is negative.
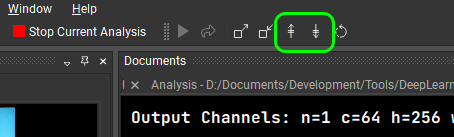
You can also shift the displayed values with the shift buttons, enabling you to push everything to display as positive or negative values.
Figure 13. Shift the displayed values to display as positive or negative
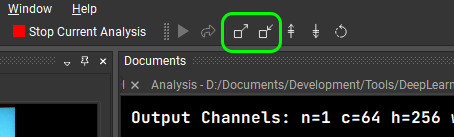
Have a look at the final output of the model and compare it with the original input. This is where the mix layer comes into play. Close down the channel inspector and look at the image output again. Use the Zoom button in the top left corner to make that output fill the user interface so that you can really see what is going on.
Figure 14. Two Zoom icons to make the output fill the Nsight DL Designer screen
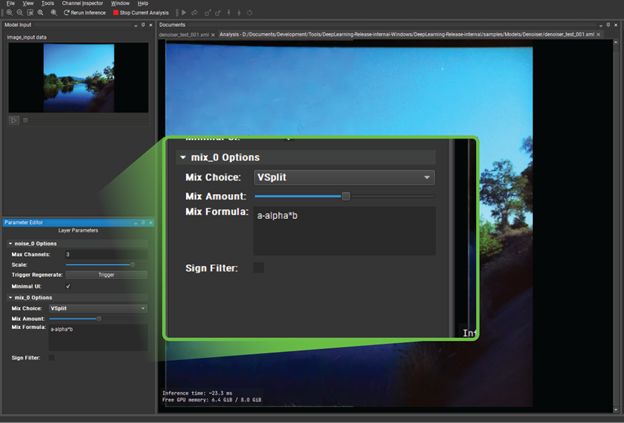
Under Mix Layer in the bottom left, change Mix Choice to V Split. When you drag the Mix Amount slider from left to right, you can see that you are actually getting a split screen between the original input and the reconstructed, denoised output. It is certainly useful, but the effect is quite subtle.
Figure 15. Using the Mix Layer option to create a split screen view
You could conclude that the denoiser is serving its purpose, but the differences are subtle. What can you do to get a clearer idea about which image parts are performing better than others?
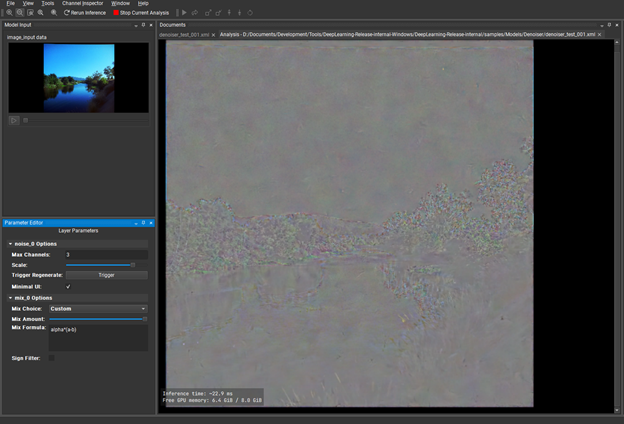
Under Mix Layer, change Mix Choice to Custom. For Mix Formula, replace the existing expression with: alpha * (a-b). The alpha keyword is effectively the normalized value of the slider and a and b are the two inputs of the layer. This creates a visual diff of the input and output that you can visually boost with the mix slider and tells you where there are fundamental differences between input and output.
This is the sort of thing that tells you, “Yes, your model is fine.” Or maybe, “You should revisit your architecture or training data.”
Figure 16. A visual diff of the input and output boosted by the Mix slider feature.
Conclusion
NVNsight DL Designer provides even more features, such as NvNeural, a highly optimized inference engine with an extensible plugin-based architecture that enables you to implement your own layer types.
Together with the design and analysis tools, DL Designer is a highly interactive and versatile solution to model design, reducing coding errors, and complexities to focus more on the capabilities and performance of your models.
For more information, see the following resources:
With Linux Switch on Spectrum, Yandex gained transparency and control over the network, and disaggregated networking hardware and software, and lowered costs.
Picture this: you’re having dinner at an upscale restaurant. You look at the menu and decide that you’re in the mood for a filet. You order the steak medium rare. The waiter brings it out, it’s plated beautifully, and the service is great. Yet you hear a little voice in the back of your head. “I could have prepared this steak in my own kitchen exactly to my definition of medium rare!”
We’ve all had that feeling: to get that perfect outcome, sometimes you’ve got to put in some of the work yourself. Yandex recognized this, and that is why they have partnered with NVIDIA to use NVIDIA Linux Switch on NVIDIA Spectrum Ethernet switches. NVIDIA is uniquely positioned to enable and support pioneers like Yandex while they grow the open networking ecosystem.
Yandex is a Russian internet company. You could describe Yandex as a search engine much like Google, but they do much more than just search. Yandex provides many services to users: music and movie streaming, translation, intelligent personal assistants, and more.
As Anton Kortunov, networking lead at Yandex, explains, “Yandex has several data centers, with each data center containing tens or even hundreds of thousands of servers connected by thousands of switches. Managing this infrastructure is no small task.”
Yandex employs cloud operational models to make the deployment, administration, and automation of the data center as efficient and seamless as possible, at as low a cost as possible.
Technological considerations
In addition to the general requirements of cloud-scale efficiency and economy, Yandex had some key needs that had to be met by any networking solution they went with:
Their data centers make extensive use of IPv6; in particular, BGP sessions inside the fabric on IPv6 link-local addresses.
QoS and ACL tools were needed, and any networking stack had to integrate with telemetry, monitoring, and automation tools.
A network switch infrastructure that supported extensive ZTP, or zero touch provisioning. In particular, the ZTP needed to tie into the monitoring tools, to verify deployment and bring-up success at scale.
Looking at their requirements, Yandex evaluated several options. To do the desired integration and automation, Yandex determined they needed a truly open-source NOS. SONiC was considered but had too many limitations around IPv6 addressing. Enter NVIDIA Linux Switch.
What is Linux Switch?
NVIDIA Linux Switch allows customers to run any Linux distribution as the network operating system on Spectrum Ethernet switches. The secret sauce for Linux Switch is Switchdev, a Linux kernel driver model that Linux Switch is based on.
Much like in the server operating system case, Linux Switch is built for independence. Rather than using proprietary APIs, fully standard Linux kernel interfaces are used to control the switch silicon. This allows the switch and Linux distribution choice to be completely independent, with the switch hardware doing the heavy lifting through offloading.
Figure 1. NVIDIA Linux Switch stack
Linux Switch brings several key benefits to Yandex. As mentioned earlier, Yandex had some key technological requirements that had to be met with any networking OS. Linux Switch provides Yandex the flexibility to customize and optimize the switch to their exact needs, with no extra features driving up cost.
The transparency of Linux Switch and the Linux operating model also allows Yandex full visibility into the distribution, greatly simplifying troubleshooting and debugging. This enabled Yandex to integrate their networking infrastructure with tooling built in-house for automation and configuration management.
By combining the Linux Switch implementation with these custom tools, Yandex had complete control over the feature set without having to build an operating system from scratch.
Why NVIDIA?
As part of the Linux kernel, there is nothing that restricts Switchdev to the NVIDIA Spectrum Ethernet platform. What makes NVIDIA Linux Switch the right choice?
The answer is that the hardware matters. The NVIDIA software-defined, hardware-accelerated approach makes Spectrum a uniquely suitable fit for Switchdev. With each new ASIC and platform, Switchdev support and compatibility is one of the first considerations in the design stage, and every NVIDIA switch platform supports Linux Switch.
In addition, the breadth of switch port speeds (from 1 to 400G) and switch form factors (1/2U, as well as half-wide) enables the Spectrum portfolio to meet any data center networking need, Switchdev or otherwise.
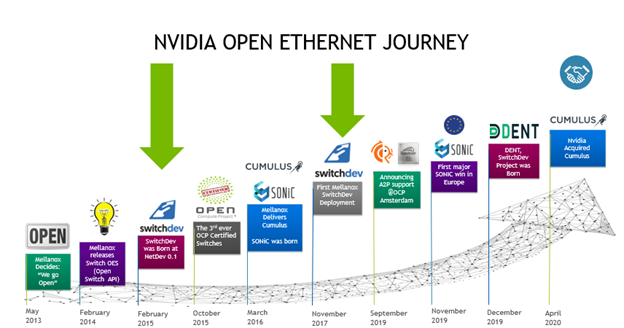
Complementing the optimized hardware portfolio, NVIDIA is a key member of the open-source networking ecosystem. NVIDIA works with the open-source community to support and triage customer issues. Linux Switch optimizations made by NVIDIA engineering are upstreamed as part of all major Linux distributions.
Figure 2. The NVIDIA Open Ethernet journey
With Linux Switch on Spectrum, Yandex gained transparency and control over the network, and disaggregated networking hardware and software, and lowered costs. As Kortunov puts it, “We met our overall goal of letting whitebox switches act like vendor boxes.” Yandex got all the positives of proprietary vendor solutions without all the associated negative baggage that comes along with proprietary lock-in.
To learn more about Yandex and their networking journey with NVIDIA, see the joint session as part of GTC. From November 8-11, GTC features hundreds of sessions packed with interesting insights and discoveries from NVIDIA customers and partners.
To attend the session with Anton Kortunov and David Iles, register for GTC. The Yandex session will be live on November 11 at 9 AM CET and will be available on-demand afterwards. Enjoy!
Read a complete overview of the Nsight suite of developer tools with new features and capabilities.
The Nsight suite of Developer Tools provide insightful tracing, debugging, profiling, and other analyses to optimize your complex computational applications across NVIDIA GPUs, and CPUs including x86, Arm, and Power architectures.
Unlocking the Power of GPU Profiler and Debugger: Nsight Systems 2021.5 and Nsight Compute 2021.3
NVIDIA Nsight Systems is a performance analysis tool designed to visualize, analyze and optimize programming models, and tune to scale efficiently across any quantity, or size, of CPUs and GPUs; from workstations to supercomputers.
Nsight Systems 2021.5 highlights include:
Statistics now available in graphical user interface (GUI).
Multireport view with horizontal and vertical layouts to aid investigations across server nodes, VMs, containers, ranks, and processes (coming soon).
Expert system now includes GPU utilization analysis for OpenGL and DX12.
NVIDIA NIC InfiniBand metrics sampling (experimental).
DirectX12 memory operations and warnings.
DXGI/DX12/Vulkan API calls correlation to WDDM queue packets.
NVIDIA Nsight Compute 2021.3 released new features for measuring and modeling occupancy, source and assembly code correlation, and a hierarchical roofline model to identify bottlenecks caused by accessing cache memory.
Key features:
Occupancy Calculator – Helps you understand the hardware resource utilization of your kernels, and model how adjustments could impact occupancy.
Command line source page – enables accessing the information from the Source page in the GUI directly from the command line. By using the --page source flag, you can see the lines of source, PTX, or assembly and the collected metrics for those lines output on the command line. This feature gives additional flexibility when it comes to analyzing the collected data as well as scripting and post-processing results for further reporting and analysis.
Hierarchical Roofline – The Roofline chart now supports a hierarchical roofline, which represents additional levels in the memory hierarchy, in addition to device memory. You can now see if developed kernels have bottlenecks related to cache memory.
There are additional improvements including more configurable baseline comparisons, access to source-level information from the CLI, and additional SSH functionality.
What’s New for Gaming and Graphics Developers: Nsight Graphics 2021.5, Nsight Perf SDK, and Nsight Aftermath SDK
NVIDIA Nsight Graphics is a powerful tool that enables you to debug and profile applications that use Direct3D (11, 12, DXR), Vulkan (1.2, Vulkan Ray Tracing), and OpenGL. It provides the ability to export frames for later analysis, as well as GPU Trace, a powerful profiler that enables you to visualize GPU low-level metrics.
This latest Nsight Graphics 2021.5 release extends support for multiple APIs with the following updates:
Full Windows 11 support for both API Capture and Tracing.
NVIDIA Nsight Perf SDK is a graphics profiling toolbox for DirectX, Vulkan, and OpenGL, enabling you to collect GPU performance metrics directly from your application.
Key features:
Simplified APIs for HTML report generation.
Lower-level range profiling APIs, with utility libraries providing ease-of-use.
All of the preceding, usable in D3D11, D3D12, OpenGL, and Vulkan.
Samples illustrating use cases in 3D, Compute, and Ray Tracing.
NVIDIA Nsight Aftermath SDKis a simple library you integrate into your D3D12 or Vulkan game’s crash reporter to generate GPU “mini-dumps” when a TDR or exception occurs.
Key features:
Support for Windows 11 for Nsight Aftermath available with Nsight Graphics 2021.5.
Debug GPU exceptions through a detailed “mini-dump.”
Contains the state of GPU pipeline subunits at exception time.
Captures all active warps and current PCs.
Map warp locations back to original HLSL/GLSL source code.
Use markers to pinpoint the exception location in the API call stream.
Helpful for debugging GPU exceptions during development, while in QA, or from deployed applications.
Efficient Model Design for In-App DL Inference: Nsight Deep Learning Designer 2021.2
Nsight Deep Learning Designer, is the first in class, IDE tool for developers who want to incorporate high-performance DL-based features into their applications.
It enables in-depth analysis of end-to-end DL workflows for efficient model design.
This release includes new features:
Inference performance profiling with GPU metrics and Tensor Core Utilization.
Analyze the model visually with the Channel Inspector.
Compatible with PyTorch.
Specialized Analysis Operators: Noise and Mix, Affine, Linear Blend, Resize, Selector, and many more.
Learn more details about Nsight DL Designer in this post.
Nsight Visual Studio 2021.3 release provides Windows 11 support for full-fledged GPU kernel debugging and code inspection for bottlenecks, system utilization, and throughput improvements.
Nsight Visual Studio is included in the CUDA® toolkit, release 11.5, with bug fixes and performance improvements.
Nsight Visual Studio Code Edition is an application development environment for heterogeneous platforms that brings CUDA® development for GPUs into Microsoft Visual Studio Code.
Nsight Visual Studio Code Edition 2021.1 release includes features like IntelliSense support for smart CUDA code completion, debug CPU and GPU code in single session, remote development for cluster environments, and more.
Nsight Eclipse Edition is a full-featured IDE powered by the Eclipse platform that provides an all-in-one integrated environment to edit, build, debug, and profile CUDA-C applications. Some key highlights include the ability to provide seamless CPU and CUDA debugging, native Eclipse plug-in, and docker container support.
NVIDIA Omniverse, a simulation and design collaboration platform for 3D virtual worlds, is already being evaluated by 700+ companies and 70,000 individuals.
TIME magazine today named NVIDIA Omniverse one of the 100 Best Inventions of 2021, saying the project is “making it easier to create ultra-realistic virtual spaces for…real-world purposes.”
Omniverse — a scalable, multi-GPU, real-time reference development platform for 3D simulation and design collaboration — is being evaluated by more than 700 companies and 70,000 individuals to create virtual worlds and unite teams, their assets, and creative applications in one streamlined interface.
“Virtual worlds are for more than just gaming—they’re useful for planning infrastructure like roads and buildings, and they can also be used to test autonomous vehicles,” TIME wrote in the story, which hits the newsstands Nov. 22. “The platform combines the real-time ray-tracing technology of the brand’s latest graphics processing units with an array of open-source tools for collaborating live in photorealistic 3-D worlds.”
The list of 100 inventions, which TIME describes as “groundbreaking,” is based on multiple factors including originality, creativity, efficacy, ambition and impact. These projects, says TIME, are changing how we live, work, play and think about what’s possible.
In this week’s GTC keynote, NVIDIA CEO Jensen Huang announced the general availability of NVIDIA Omniverse Enterprise, and showed how companies like Ericsson, BMW and Lockheed Martin are using the platform to create digital twins to simulate 5G networks, build a robotic factory and prevent wildfires.
He also revealed a host of new features for Omniverse, and powerful new capabilities including Omniverse Avatar for interactive conversational AI assistants and Omniverse Replicator, a powerful synthetic data generation engine for training autonomous vehicles and robots.
At the inaugural NVIDIA Omniverse Developer Day at GTC, developers were introduced to a new way to build, license, and distribute native applications, extensions, connectors, and microservices for the platform — opening new paths to market for millions of developers. To get started with NVIDIA Omniverse, download the free open beta for individuals, or explore Omniverse Enterprise. Omniverse users have access to a wide range of technical resources, tutorials and more with the NVIDIA Developer Program.
Read about the new EC2 G5 instance that powers remote graphics, visual computing, AI/ML training, and inference workloads on AWS cloud.
Today, AWS announced the general availability of the new Amazon EC2 G5 instances, powered by NVIDIA A10G Tensor Core GPUs. These instances are designed for the most demanding graphics-intensive applications, as well as machine learning inference and training simple to moderately complex machine learning models on the AWS cloud.
The new EC2 G5 instances feature up to eight NVIDIA A10G Tensor Core GPUs that are optimized for advanced visual computing workloads. With support for NVIDIA RTX technology and more RT (ray tracing) cores than any other NVIDIA GPU instance on AWS, it offers up to 3X better graphics performance. Based on NVIDIA Ampere Architecture, G5 instances offer up to 3X higher performance for machine learning inference and 3.3X higher performance for machine learning training, compared to the previous generation Amazon EC2 G4dn instances.
Customers can use the G5 instances to accelerate a broad range of graphics applications like interactive video rendering, video editing, computer-aided design, photorealistic simulations, 3D visualization, and gaming. G5 instances also deliver the best user experience for real-time AI inference performance at scale for use-cases like content and product recommendations, voice assistants, chatbots, and visual search.
Getting the most out of EC2 G5 instances using NVIDIA optimized software
To unlock the breakthrough graphics performance on the new G5 instances, creative and technical professionals can use the NVIDIA RTX Virtual Workstation (vWS) software, available from the AWS Marketplace. Only available from NVIDIA, these NVIDIA RTX vWS advancements include hundreds of certified professional ISV applications, support for all of the leading rendering apps, and optimization with all major gaming content.
NVIDIA RTX technology delivers exceptional features like ray tracing and AI-denoising. Creative professionals can achieve photorealistic quality with accurate shadows, reflections, and refractions—creating amazing content faster than ever before.
NVIDIA RTX vWS also supports Deep Learning Super Sampling (DLSS). This gives designers, engineers, and artists the power of AI for producing the highest visual quality, from anywhere. They can also take advantage of technologies like NVIDIA Iray and NVIDIA OptiX for superior rendering capabilities.
Developers on AWS can use state-of-the-art pretrained AI models, GPU-optimized deep learning frameworks, SDKs, and end-to-end application frameworks from the NGC Catalog on AWS Marketplace soon. In particular, developers can take advantage of NVIDIA TensorRT and NVIDIA Triton Inference Server to optimize inference performance and serve ML models at scale using G5 instances.
Developers have multiple options to take advantage of NVIDIA-optimized software on AWS. Whether you provision and manage the G5 instances yourself or leverage them in AWS managed services like Amazon Elastic Kubernetes service (EKS) or Amazon Elastic Container Service (ECS).
Learn more about the EC2 G5 instances and get started. >>
AWS and NVIDIA have collaborated to develop an online course that introduces Amazon SageMaker with EC2 Instances powered by NVIDIA GPUs.
AWS and NVIDIA have collaborated to develop an online course that guides you through a simple-to-follow and practical introduction to Amazon SageMaker with EC2 Instances powered by NVIDIA GPUs. This course is grounded in the practical application of services and gives you the opportunity to learn hands-on from experts in machine learning development. Through a simple and straightforward approach, once completed, you will have the confidence and competency to immediately begin working on your ML project.
Machine learning can be complex, tedious, and time-consuming. AWS and NVIDIA provide the fastest, most effective, and easy-to-use ML tools to get you started on your ML project. Amazon SageMaker helps data scientists and developers prepare, build, train, and deploy high-quality ML models quickly by bringing together a broad set of capabilities purpose-built for ML. Amazon EC2 instances powered by NVIDIA GPUs along with NVIDIA software offer high-performance, GPU-optimized instances in the cloud for efficient model training and cost-effective model inference hosting.
In this course, you will first be given a high-level overview of modern machine learning. Then, we will dive right in and get you up and running with a GPU-powered SageMaker instance. You will learn how to prepare a dataset for training a model, how to build a model, how to execute the training of a model, and how to deploy and optimize a model. You will learn hands-on how to apply this workflow for computer vision (CV) and natural language processing (NLP) use cases.
After completing this course, you will be able to build, train, deploy, and optimize ML workflows with GPU acceleration in Amazon SageMaker and understand the key SageMaker services applicable to tabular, computer vision, and language ML tasks. You will feel empowered and have the confidence and competency to solve complex machine learning problems in a more efficient manner. By using SageMaker, you will simplify workflows so you can build and deploy ML models quickly, freeing you up to focus on other problems to solve.
Course Overview
This course is designed for machine learning practitioners, including data scientists and developers, who have a working knowledge of machine learning workflows. In this course, you will gain hands-on experience with Amazon SageMaker and Amazon EC2 instances powered by NVIDIA GPUs. There are four modules in the course:
Module 1 – Introduction to Amazon SageMaker and NVIDIA GPUs
In this module, you will learn about the purpose-built tools available within Amazon SageMaker for modern machine learning. This includes a tour of the Amazon SageMaker Studio IDE that can be used to prepare, build, train and tune, and deploy and manage your own ML models. Then you will learn how to use Amazon SageMaker classic notebooks and Amazon SageMaker Studio notebooks to develop natural language processing (NLP), computer vision (CV), and other ML models using RAPIDS. You will also dive deep into NVIDIA GPUs, the NGC Catalog, and instances available on AWS for ML.
Module 2 – GPU Accelerated Machine Learning Workflows with RAPIDS and Amazon SageMaker
In this module, you will apply your knowledge of NVIDIA GPUs and Amazon SageMaker. You will gain a background in GPU accelerated machine learning and perform the steps required to set up Amazon SageMaker. You will then learn about data acquisition and data transformation, move on to model design and training, and finish up by evaluating hyperparameter optimization, AutoML, and GPU accelerated inferencing.
Module 3 – Computer Vision
In this module, you will learn about the application of deep learning for computer vision (CV). As humans, half of our brains are devoted to visual processing, making it critical to how we perceive the world. Endowing machines with sight has been a challenging endeavor, but advancements in compute, algorithms, and data quality have made computer vision more accessible than ever before. From mobile cameras to industrial mechanic lenses, biological labs to hospital imaging, and self-driving cars to security cameras, data in pixel format is one of the most valuable types of data for consumers and companies. In this module, you will explore common CV applications, and you will learn how to build an end-to-end object detection model on Amazon SageMaker using NVIDIA GPUs.
Module 4 – Natural Language Processing
In this module, you will learn about applying deep learning technologies to the problem of language understanding. What does it mean to understand languages? What is language modeling? What is the BERT language model, and why are such language models used in many popular services like search, office productivity software, and voice agents? Are NVIDIA GPUs a fast and cost-efficient platform to train and deploy NLP Models? In this module, you will find answers to all those questions and more. Whether you are an experienced ML engineer considering implementation or a developer wanting to learn to deploy a language understanding model like BERT quickly, this module is for you.
Conclusion
AWS and NVIDIA provide fast, effective, easy-to-use ML tools to get you started on working on your ML project. Learn more about the course to guide you through your ML journey!
The model filename is something like `Mobilenet_V1_1.0_224_quant.tflite`
I understand that 224 is the input size but I’m not sure what the 1.0 represents. It would be useful if someone can tell me what the 1.0 means. Feel free to link some docs that would give me insight if you find that easier 🙂
hi guys lately I find a TensorFlow Lite model and I wanna use it on my android app (the link of the model below) and I didn’t find input and the outputs
and if I wondering if there a way to see the inputs and outputs type

 Learn how building models with NVIDIA Data Science Workbench can improve management and increase productivity.
Learn how building models with NVIDIA Data Science Workbench can improve management and increase productivity. ![NVIDIA Data Science Workbench connects to the NVIDIA GPU Cloud and is also connected to JupyterLab, PyTorch, TensorFlow, RAPIDS, and multiple CLIs including Kaggle, NGC, NVIDIA Data Science Stack, and AWS.The foundation of the diagram is the NVIDIA-Certified Data Science Workstation and OS which supports Drivers, CUDA, nv-docker, and Docker]](https://developer-blogs.nvidia.com/wp-content/uploads/2021/11/DSW_Pic1-1.png)
 container updates. Also, get notified about other important updates.
container updates. Also, get notified about other important updates.  NVIDIA announced the latest release in Nsight Graphics, which supports Direct3D, Vulkan, OpenGL, OpenVR, and the Oculus SDK.
NVIDIA announced the latest release in Nsight Graphics, which supports Direct3D, Vulkan, OpenGL, OpenVR, and the Oculus SDK. 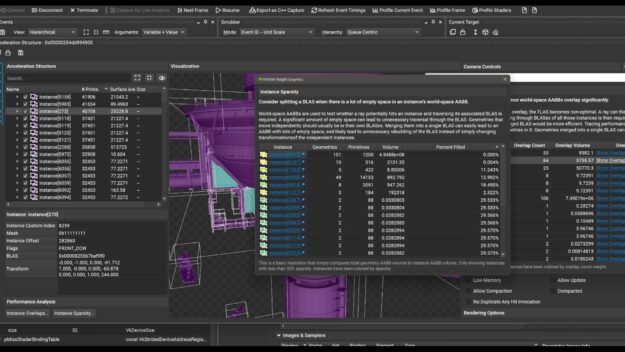
 Technical overview of the Nsight DL Designer tool to help ease the process of performant model design.
Technical overview of the Nsight DL Designer tool to help ease the process of performant model design.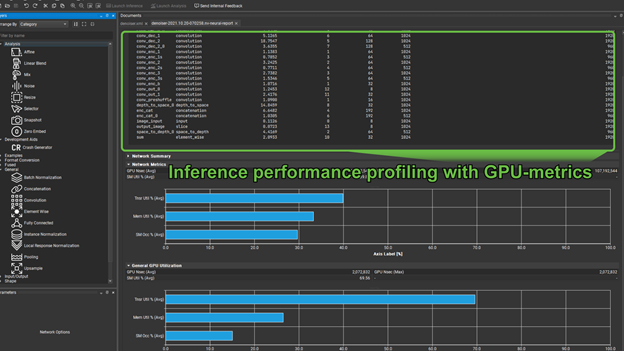
 With Linux Switch on Spectrum, Yandex gained transparency and control over the network, and disaggregated networking hardware and software, and lowered costs.
With Linux Switch on Spectrum, Yandex gained transparency and control over the network, and disaggregated networking hardware and software, and lowered costs. 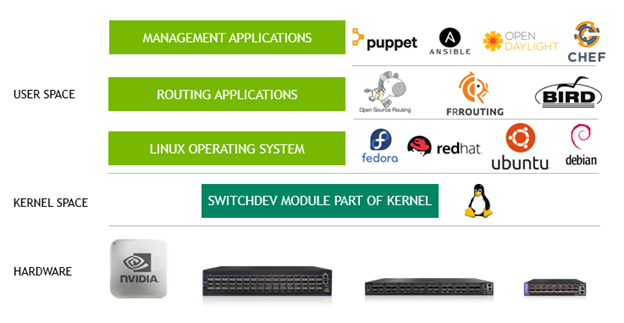
 Read a complete overview of the Nsight suite of developer tools with new features and capabilities.
Read a complete overview of the Nsight suite of developer tools with new features and capabilities.  NVIDIA Omniverse, a simulation and design collaboration platform for 3D virtual worlds, is already being evaluated by 700+ companies and 70,000 individuals.
NVIDIA Omniverse, a simulation and design collaboration platform for 3D virtual worlds, is already being evaluated by 700+ companies and 70,000 individuals. Read about the new EC2 G5 instance that powers remote graphics, visual computing, AI/ML training, and inference workloads on AWS cloud.
Read about the new EC2 G5 instance that powers remote graphics, visual computing, AI/ML training, and inference workloads on AWS cloud. AWS and NVIDIA have collaborated to develop an online course that introduces Amazon SageMaker with EC2 Instances powered by NVIDIA GPUs.
AWS and NVIDIA have collaborated to develop an online course that introduces Amazon SageMaker with EC2 Instances powered by NVIDIA GPUs.