How to replace the code snippet with TensorFlow 1.14.1 feature_columns = [tf. contrib. layers. real_value_column ( “” , dimension = 98)] in TensorFlow 2.4.1?
submitted by /u/Myprok
[visit reddit] [comments]
 DataBloom
DataBloomHow to replace the code snippet with TensorFlow 1.14.1 feature_columns = [tf. contrib. layers. real_value_column ( “” , dimension = 98)] in TensorFlow 2.4.1?
submitted by /u/Myprok
[visit reddit] [comments]
 OptiX 7.3 brings temporal denoising and improvements to OptiX Curves primitives and new features to the OptiX Demand Loading library
OptiX 7.3 brings temporal denoising and improvements to OptiX Curves primitives and new features to the OptiX Demand Loading library
OptiX 7.3 brings temporal denoising and improvements to OptiX Curves primitives and new features to the OptiX Demand Loading library
NVIDIA Optix Ray Tracing Engine is a scalable and seamless framework that offers optimal ray tracing performance on GPUs. In this spring’s update to the OptiX SDK, developers will be able to leverage temporal denoising, faster curve intersectors, and fully asynchronous demand loading library.
Smoother Denoising for Moving Sequences
The OptiX denoiser comes with a brand new denoising mode called temporal denoising, which is engineered to denoise multi-frame animation sequences without getting any of the low-frequency denoiser artifacts in the animation that you get when you denoise animated frames separately. The results are impressively smooth, and this update will be a boon to users of the OptiX denoiser who want to remove noise from moving sequences. This has been one of our most requested features and now it’s here. This release of the OptiX denoiser comes with yet another performance increase as well, and the recent AOV (layered) denoising and brand new temporal denoising are fast enough on the current generation of NVIDIA GPUs to be used in real time for interactive applications, with plenty of room to spare for rendering.
Improved Curves For Better Ray Tracing Performance
OptiX 7.3 comes with a round of updates to the curve primitive intersectors. Our new cubic and quadratic curve intersectors are 20% to 80% faster with this release, and even the already very fast linear intersector (up to 2x faster than cubic) has improved in performance a bit as well. All the intersectors now support backface culling by default, which makes it easier for developers to support shadows, transparency, and other lighting effects that depend on reflected and transmitted secondary rays from hair and curves. The best kept secret so far about OptiX curves is how fast they are with OptiX motion blur on the new generation of Ampere GPUs. With Ampere’s new hardware acceleration of motion blur, we’re seeing performance increases on motion blurred hair up to 3x faster than motion blurred hair on Turing cards.

Faster Object Loading Without Extra GPU Resources
The demand loading library, included with the OptiX 7.3 download, has also received updates. It is now fully asynchronous, with sparse texture tiles loaded in the background by multiple CPU threads in parallel with OptiX kernels executing on the GPU. Support has also been added for multiple streams, which allows for the hiding of texture I/O latency and an easier implementation of bucketed rendering approach. This increased parallelism, in conjunction with additional performance updates present in the OptiX 7.3 SDK should offer a compelling reward for adding demand loading in your projects. A new sample has been added and the existing associated samples have been updated to give you a great place to start.

 3D deep learning researchers can enter NVIDIA Omniverse and simplify their workflows with the Omniverse Kaolin app, now available in open beta.
3D deep learning researchers can enter NVIDIA Omniverse and simplify their workflows with the Omniverse Kaolin app, now available in open beta.
3D deep learning researchers can enter NVIDIA Omniverse and simplify their workflows with the Omniverse Kaolin app, now available in open beta.
The Omniverse platform provides researchers, developers, and engineers with the ability to virtually collaborate and work between different software applications. Omniverse Kaolin is an interactive application that acts as a companion to the NVIDIA Kaolin library, helping 3D deep learning researchers accelerate their process.
The Kaolin app leverages the Omniverse platform, USD format and RTX rendering to provide interactive tools that allow visualizing 3D outputs of any deep learning model as it is training, inspecting 3D datasets to find inconsistencies and gain intuition, and rendering large synthetic datasets from collections of 3D data.
Omniverse Kaolin enables users to reduce the time needed to develop AI research for a wide range of 3D applications.
The Omniverse Kaolin Training Visualizer extension allows interactive visualization of 3D checkpoints exported using Kaolin Library python API. By scrubbing through iterations, researchers can see the progression of training over time, and visualize multiple textures and labels that may be predicted for each 3D model.
The 3D checkpoints can include meshes, point clouds and voxel grids in any number of categories, with multiple textures and labels supported for meshes. The extension also allows creating and saving custom layouts for visualizing results consistently across experiments.
The performance of machine learning models can depend heavily on the properties of the training data. The Omniverse Kaolin Dataset Visualizer extension allows sampling and visualizing batches from 3D datasets to gain intuition and identify problems that can hinder learning.
Many machine learning techniques rely on images and ground truth labels for training, and synthetic data is a powerful tool to support such applications. The Omniverse Kaolin Data Generator extension uses NVIDIA RTX ray and path tracing to render massive image datasets from a collection of 3D data, while also exporting custom ground truth labels from a variety of sensors.
Download NVIDIA Omniverse and install Omniverse Kaolin today.
 AI machine learning is unlocking breakthrough applications in fields such as online product recommendations, image classification, chatbots, forecasting, and manufacturing quality inspection. There are two parts to AI: training and inference. Inference is the production phase of AI. The trained model and associated code are deployed in the data center or public cloud, or at … Continued
AI machine learning is unlocking breakthrough applications in fields such as online product recommendations, image classification, chatbots, forecasting, and manufacturing quality inspection. There are two parts to AI: training and inference. Inference is the production phase of AI. The trained model and associated code are deployed in the data center or public cloud, or at … Continued
AI machine learning is unlocking breakthrough applications in fields such as online product recommendations, image classification, chatbots, forecasting, and manufacturing quality inspection. There are two parts to AI: training and inference.
Inference is the production phase of AI. The trained model and associated code are deployed in the data center or public cloud, or at the edge to make predictions. This process is called inference serving and is complex for the following reasons:
Often, organizations end up having multiple, disparate inference serving solutions, per model, per framework, or per application.
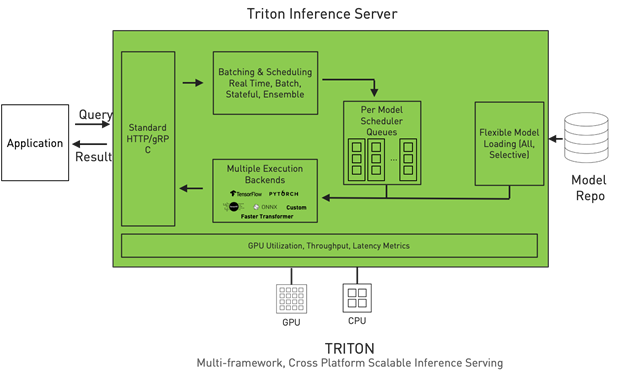
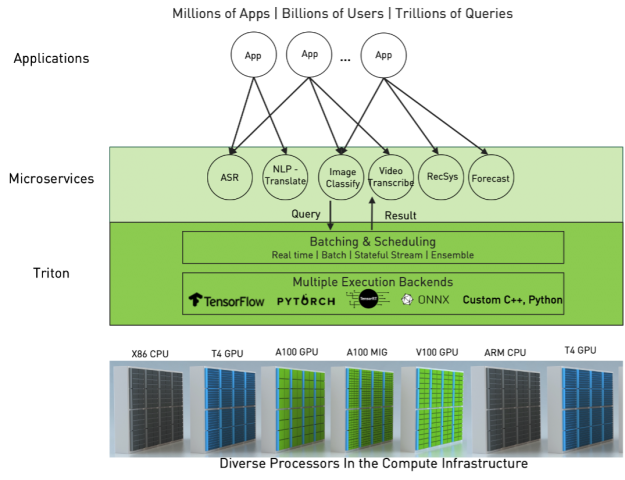
NVIDIA Triton Inference Server is an open-source inference serving software that simplifies inference serving for an organization by addressing the above complexities. Triton provides a single standardized inference platform which can support running inference on multi-framework models, on both CPU and GPU, and in different deployment environments such as datacenter, cloud, embedded devices, and virtualized environments.
It natively supports multiple framework backends like TensorFlow, PyTorch, ONNX Runtime, Python, and even custom backends. It supports different types of inference queries through advanced batching and scheduling algorithms, supports live model updates, and runs models on both CPUs and GPUs. Triton is also designed to increase inference performance by maximizing hardware utilization through concurrent model execution and dynamic batching. Concurrent execution allows you to run multiple copies of a model, and multiple different models, in parallel on the same GPU. Through dynamic batching, Triton can dynamically group together inference requests on the server-side to maximize performance.
To further simplify the process of deploying models in production, the 2.9 release introduces a new suite of capabilities. A trained model is generally not optimized for deployment in production. You must go through a series of conversion and optimizations for your specific target environment. The following process shows a TensorRT deployment using Triton on a GPU. This applies to any inference framework, whether it’s deployed on CPU or GPU.
As you can see, this process can take significant time and effort.
You can use the new Model Navigator in Triton to automate the process. Available as an alpha version, it can convert an input model from any framework (TensorFlow and PyTorch are supported in this release) to TensorRT, validate the conversion for correctness, automatically find and create the most optimal model configuration, and generate the repo structure for the model deployment. What could take days for each type of model now can be done in hours.
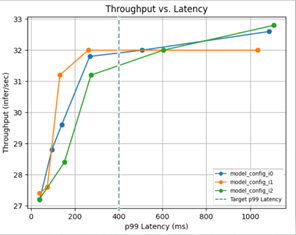
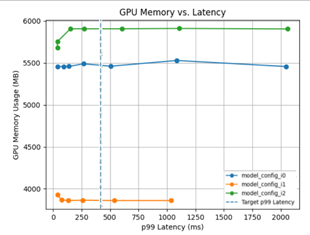
For efficient inference serving, you must identify the optimal model configurations, such as the batch size and number of concurrent models. Today, you must try different combinations manually to eventually find the optimal configuration for your throughput, latency, and memory utilization requirements.
Triton Model Analyzer is another optimization tool that automates this selection for you by automatically finding the best configuration for models to get the highest performance. You can specify performance requirements, such as a latency constraint, throughput target, or memory footprint. The model analyzer searches through different model configurations and finds the one that provides the best performance under your constraints. To help visualize the performance of the top configurations, it then outputs a summary report, which includes charts (Figure 2).
You do not have to settle for a less optimized inference service because of the inherent complexity in getting to an optimized model. You can use Triton to easily get to the most efficient inference.
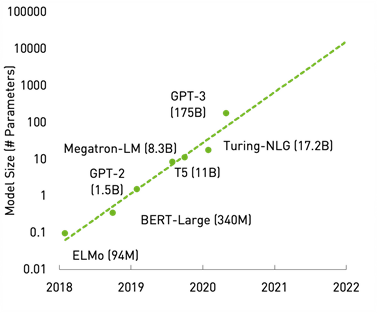
Models are rapidly growing especially in areas of natural language processing. For example, consider the GPT-3 model. Its full capabilities are still being explored. It has been shown to be effective in use cases such as reading comprehension and summarization of text, Q&A, human-like chatbots, and software code generation.
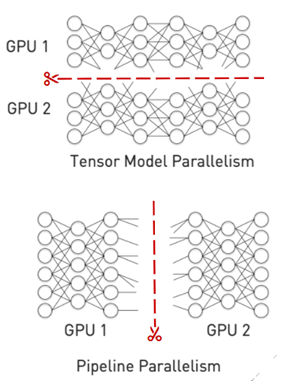
In this post, we don’t delve into the models. Instead, we look at the cost-effective inference of such giant models. GPUs are naturally the right compute resource for these workloads, but these models are so large that they cannot fit on a single GPU. For more information about a framework to train giant models on multi-GPU, multi-node systems, see Scaling Language Model Training to a Trillion Parameters Using Megatron.
For inference, you must split the model into multiple smaller files and load each on a separate GPU. There are generally two approaches to splitting a model:
The Triton custom backend feature can be used to run multi-GPU, multi-node backends. In addition, Triton has a model ensemble feature that can be used for pipeline parallelism.
Giant models are still in their infancy, but it won’t be long until you see production AI running multiple giant models for different use cases.
Inference serving is a production activity and can require integration with many ecosystem software and tools. Triton integrates with several, with new integrations added regularly.
Triton is used by both large and small customers to serve models in production for all types of applications, such as computer vision, natural language processing, and recommender systems. Here are a few examples across different use cases:
For more information about customers using Triton in production deployments, see NVIDIA Triton Tames the Seas of AI Inference.
Triton helps with a standardized scalable production AI in every data center, cloud, and embedded device. It supports multiple frameworks, runs models on both CPUs and GPUs, handles different types of inference queries, and integrates with Kubernetes and MLOPs platforms.
Download Triton today as a Docker container from NGC and find the documentation in the triton-inference-server GitHub repo. For more information, see the NVIDIA Triton Inference Server product page.
 This DevKit targets heterogeneous GPU/CPU system development, and includes an Arm CPU, an NVIDIA A100 Tensor Core GPU, and the NVIDIA HPC SDK suite of tools.
This DevKit targets heterogeneous GPU/CPU system development, and includes an Arm CPU, an NVIDIA A100 Tensor Core GPU, and the NVIDIA HPC SDK suite of tools.
NVIDIA announced the NVIDIA Arm HPC Developer Kit, an integrated hardware-software platform for creating, evaluating, and benchmarking HPC, AI and scientific computing applications. Developers can apply today for the early interest program.
This DevKit targets heterogeneous GPU/CPU system development, and includes an Arm CPU, an NVIDIA A100 Tensor Core GPU, and the NVIDIA HPC SDK suite of tools.
It delivers:
The NVIDIA Arm HPC Developer Kit is based on the GIGABYTE G242-P32 2U server, and leverages the NVIDIA HPC SDK, a comprehensive suite of compilers, libraries, and tools for HPC delivering performance, portability, and productivity. The platform will support Ubuntu, SLES, and RHEL operating systems.
Developers are invited to apply for our early interest program to stay informed of pricing and availability. Learn more and apply now.
Read more on NVIDIA and Arm support:
 The NVIDIA CloudXR platform will be available on NVIDIA GPU-powered virtual machine instances on Azure.
The NVIDIA CloudXR platform will be available on NVIDIA GPU-powered virtual machine instances on Azure.
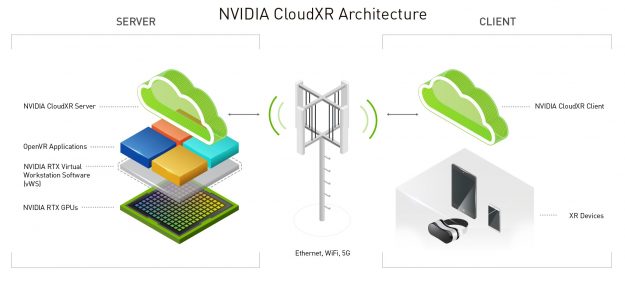
NVIDIA is raising the bar for XR streaming. Announced today, the NVIDIA CloudXR platform will be available on NVIDIA GPU-powered virtual machine instances on Azure.
NVIDIA CloudXR is built on NVIDIA RTX GPUs to enable streaming of immersive AR, VR or mixed reality experiences from anywhere. By streaming from the cloud, enterprises can easily set up and scale immersive experiences from any location, to any VR or AR device. Companies and customers no longer need to purchase expensive high-performing workstations to experience high-quality, immersive environments.
NVIDIA partners Innoactive, TechViz, and Vection Technologies are among the first to use CloudXR on Azure instances.
With NVIDIA CloudXR, customers of Vection Technologies can access the Mindesk platform from anywhere, using standalone AR or VR headsets like the HTC Vive Focus. Enterprises can now easily share their 3D CAD, CAM, and BIM environments among colleagues and customers in real time. And since most of the computation happens in the cloud, any business can take advantage of the capabilities of CloudXR without spending money on expensive computational powerhouses.
“One of the greatest obstacles to the adoption of AR and VR was the necessity for a dedicated GPU. And even when that is available, it is not enough for more complex and dynamic content like CAD, CAM, BIM and simulations,” said Gabriele Sorrento, director of Vection Technologies. “NVIDIA CloudXR solves both problems. By decoupling the app from the workstation, CloudXR makes complex AR and VR data available anywhere.”
Vection Technologies plans to ship the Mindesk Suite with NVIDIA CloudXR.
Another early user of CloudXR on Azure is Innoactive, a company that provides a platform to deploy VR training at scale in large organizations. Working with companies such as SAP, Innoactive uses NVIDIA CloudXR and Azure to enhance VR training while keeping content secure and easily accessible from the cloud.
“SAP customers have large and complex CAD models which they want to use in their VR process simulations and training applications,” said Michael Spiess, venture lead for extended reality at SAP. “With CloudXR, we can easily stream those VR simulations with the highest quality visuals to any device — whether it’s an HMD, a tablet, or even a smartphone. Innoactive Portal supports NVIDIA CloudXR and makes all this available with a click of a button. This will help us to offer XR Cloud services to our 200 million business users.”
Users can try CloudXR on Azure today by downloading the Innoactive Portal app, and experience XR streaming from the cloud with their own VR headset.

The CloudXR platform includes:
With CloudXR running on GPU-powered VM instances on Azure, companies can provide users with high-quality virtual experiences from anywhere in the world.
NVIDIA CloudXR on Azure will be generally available later this year, with a private beta available soon. Apply now for early access to the SDK, and sign up to get the latest news and updates on upcoming CloudXR releases, including the private beta.
 The latest versions of Nsight Systems 2021.2 and, Nsight Compute 2021.1 are now available with new features for GPU profiling and performance optimization.
The latest versions of Nsight Systems 2021.2 and, Nsight Compute 2021.1 are now available with new features for GPU profiling and performance optimization.
Today we announced the latest versions of Nsight Systems 2021.2 and, Nsight Compute 2021.1 – now available with new features for GPU profiling and performance optimization.
We also announced the Nsight Visual Studio Code Edition, NVIDIA’s new addition to the series of world class developer tools for CUDA programming and debugging.
Nsight Systems 2021.2
Nsight Systems 2021.2, introduces support for GPU metrics sampling and tracing of CUDA Unified Memory page faults on the CPU and GPU. There’s also support for Reflex SDK, CUDA 11.3, and additional enhancements in network trace, including: NCCL, NVSHMEM, OpenSHMEM, and MPI fortran.
The GPU metrics sampling feature allows you to view and analyze low level utilization details on a timeline. These provide a system wide overview of efficiency for your GPU workloads. They include metrics on IO activity including throughput for PCIe, NVLink, and DRAM. They also show SM utilization, TensorCore activity, instructions issued, warp occupancy and unallocated warps.

This expands Nsight Systems ability to profile system-wide activity and help track GPU workloads and their CPU origins. By providing a deeper understanding of the GPU utilization over multiple processes and contexts; covering the interop of Graphics and Compute workloads including CUDA, OptiX, DirectX and Vulkan ray tracing + rasterization APIs.
Resources:
Learn More & Download Now
Documentation
Forums
GTC Session: Tuning GPU Network and Memory Usage in Apache Spark]
Nsight Compute 2021.1
Nsight Compute 2021.1 is available now and adds a new NVLink topology and properties section to help users understand the hardware layout of their platform and how it may be impacting performance.
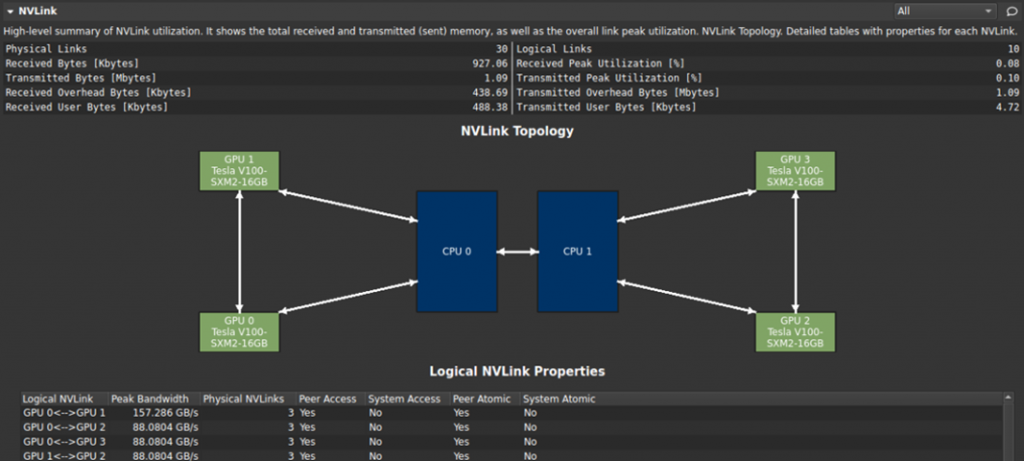
This new version also adds OptiX 7 API stepping, MacOS 11 Big Sur host support, and improved resource tracking capabilities for user objects, stream capture, and asynchronous suballocations.
These new features give the user increased visibility into the dynamic performance behavior of their workloads and how they are using hardware and software resources.
Resources:
Learn More & Download Now
Documentation
Forums
GTC Session: Requests, Wavefronts, Sectors Metrics: Understanding and Optimizing Memory-Bound Kernels with Nsight Compute
Additional videos and articles for more information.
Nsight Visual Studio Code Edition
Nsight Visual Studio Code Edition is an extension to Visual Studio Code editor for CUDA programming and debugging.
Nsight Visual Studio Code Edition provides syntax highlighting, CUDA debugging, Problems tab integration for nvcc, and Intellisense features for kernel functions including auto-completion, go to definition, and find all references.
Resources:
Join the Interest Program Now
GTC Session: Latest Enhancement to CUDA Debugger IDEs
Subscribe to our YouTube channel for future release highlights and feature spotlights.
 The upcoming NVIDIA CloudXR 2.1 release will deliver support for Apple iOS AR devices, including iPads and iPhones.
The upcoming NVIDIA CloudXR 2.1 release will deliver support for Apple iOS AR devices, including iPads and iPhones.
The upcoming NVIDIA CloudXR 2.1 release will deliver support for Apple iOS AR devices, including iPads and iPhones.
Built on NVIDIA RTX technology, CloudXR is an advanced streaming technology that delivers VR and AR across 5G and Wi-Fi networks.XR users no longer need to be physically tethered to a high-performance computer to experience rich, immersive environments.
The CloudXR SDK runs on NVIDIA servers located in the cloud, edge or on-premises, delivering the advanced graphics performance needed for wireless virtual, augmented or mixed reality environments.
An early adopter of CloudXR on iOS is Brightline Interactive, a company that provides immersive VR and AR technology solutions to customers. Brightlight Interactive is using CloudXR to enhance immersive experiences and services for clients.
“With the addition of iOS support within CloudXR, we can now deploy content in a platform-agnostic way, enabling us to expand capabilities for delivery and increase our ability to target content for end clients,” said Jason Powers, chief creative technologist at Brightline Interactive. “From a developer perspective, porting apps from Android to iOS, especially for real-time rendered content, can be painstaking work. By utilizing CloudXR, we can quickly and easily add iOS as a target platform for our real-time networked augmented reality experience.”
The key features of CloudXR 2.1 include:
The CloudXR iOS integration will soon be available in NVIDIA Omniverse.
Omniverse is a collaboration and simulation platform that streamlines 3D production pipelines across industries by giving individual users and globally dispersed teams the ability to collaborate between leading industry applications in a shared virtual space in real time. With the newest CloudXR iOS integration, Omniverse users will also be able to stream AR content using their iOS tablets and phones.
If you are interested in using CloudXR, apply here: https://developer.nvidia.com/nvidia-cloudxr-sdk
Sign up to get the latest news and updates on NVIDIA XR.
 Python plays a key role within the science, engineering, data analytics, and deep learning application ecosystem. NVIDIA has long been committed to helping the Python ecosystem leverage the accelerated massively parallel performance of GPUs to deliver standardized libraries, tools, and applications. Today, we’re introducing another step towards simplification of the developer experience with improved Python … Continued
Python plays a key role within the science, engineering, data analytics, and deep learning application ecosystem. NVIDIA has long been committed to helping the Python ecosystem leverage the accelerated massively parallel performance of GPUs to deliver standardized libraries, tools, and applications. Today, we’re introducing another step towards simplification of the developer experience with improved Python … Continued
Python plays a key role within the science, engineering, data analytics, and deep learning application ecosystem. NVIDIA has long been committed to helping the Python ecosystem leverage the accelerated massively parallel performance of GPUs to deliver standardized libraries, tools, and applications. Today, we’re introducing another step towards simplification of the developer experience with improved Python code portability and compatibility.
Our goal is to help unify the Python CUDA ecosystem with a single standard set of low-level interfaces, providing full coverage of and access to the CUDA host APIs from Python. We want to provide an ecosystem foundation to allow interoperability among different accelerated libraries. Most importantly, it should be easy for Python developers to use NVIDIA GPUs.
To date, access to CUDA and NVIDIA GPUs through Python could only be accomplished by means of third-party software such as Numba, CuPy, Scikit-CUDA, RAPIDS, PyCUDA, PyTorch, or TensorFlow, just to name a few. Each wrote its own interoperability layer between the CUDA API and Python.
By releasing CUDA Python, NVIDIA is enabling these platform providers to focus on their own value-added products and services. NVIDIA also hopes to lower the barrier to entry for other Python developers to use NVIDIA GPUs. The initial release of CUDA Python includes Cython and Python wrappers for the CUDA Driver and runtime APIs.
In future releases, we may offer a Pythonic object model and wrappers for CUDA libraries (cuBLAS, cuFFT, cuDNN, nvJPEG, and so on). Upcoming releases may also be available with source code on GitHub or packaged through PIP and Conda.
Because Python is an interpreted language, you need a way to compile the device code into PTX and then extract the function to be called at a later point in the application. It’s not important for understanding CUDA Python, but Parallel Thread Execution (PTX) is a low-level virtual machine and instruction set architecture (ISA). You construct your device code in the form of a string and compile it with NVRTC, a runtime compilation library for CUDA C++. Using the NVIDIA Driver API, manually create a CUDA context and all required resources on the GPU, then launch the compiled CUDA C++ code and retrieve the results from the GPU. Now that you have an overview, jump into a commonly used example for parallel programming: SAXPY.
The first thing to do is import the Driver API and NVRTC modules from the CUDA Python package. In this example, you copy data from the host to device. You need NumPy to store data on the host.
import cuda_driver as cuda # Subject to change before release import nvrtc # Subject to change before release import numpy as np
Error checking is a fundamental best practice in code development and a code example is provided. For brevity, error checking within the example is omitted. In a future release, this may automatically raise exceptions using a Python object model.
def ASSERT_DRV(err):
if isinstance(err, cuda.CUresult):
if err != cuda.CUresult.CUDA_SUCCESS:
raise RuntimeError("Cuda Error: {}".format(err))
elif isinstance(err, nvrtc.nvrtcResult):
if err != nvrtc.nvrtcResult.NVRTC_SUCCESS:
raise RuntimeError("Nvrtc Error: {}".format(err))
else:
raise RuntimeError("Unknown error type: {}".format(err))
It’s common practice to write CUDA kernels near the top of a translation unit, so write it next. The entire kernel is wrapped in triple quotes to form a string. The string is compiled later using NVRTC. This is the only part of CUDA Python that requires some understanding of CUDA C++. For more information, see An Even Easier Introduction to CUDA.
saxpy = """
extern "C" __global__
void saxpy(float a, float *x, float *y, float *out, size_t n)
{
size_t tid = blockIdx.x * blockDim.x + threadIdx.x;
if (tid
Go ahead and compile the kernel into PTX. Remember that this is executed at runtime using NVRTC. There are three basic steps to NVRTC:
In the following code example, compilation is targeting compute capability 75, or Turing architecture, with FMAD enabled. If compilation fails, use nvrtcGetProgramLog to retrieve a compile log for additional information.
# Create program err, prog = nvrtc.nvrtcCreateProgram(str.encode(saxpy), b"saxpy.cu", 0, [], []) # Compile program opts = [b"--fmad=false", b"--gpu-architecture=compute_75"] err, = nvrtc.nvrtcCompileProgram(prog, 2, opts) # Get PTX from compilation err, ptxSize = nvrtc.nvrtcGetPTXSize(prog) ptx = b" " * ptxSize err, = nvrtc.nvrtcGetPTX(prog, ptx)
Before you can use the PTX or do any work on the GPU, you must create a CUDA context. CUDA contexts are analogous to host processes for the device. In the following code example, the Driver API is initialized so that the NVIDIA driver and GPU are accessible. Next, a handle for compute device 0 is passed to cuCtxCreate to designate that GPU for context creation. With the context created, you can proceed in compiling the CUDA kernel using NVRTC.
# Initialize CUDA Driver API err, = cuda.cuInit(0) # Retrieve handle for device 0 err, cuDevice = cuda.cuDeviceGet(0) # Create context err, context = cuda.cuCtxCreate(0, cuDevice)
With a CUDA context created on device 0, load the PTX generated earlier into a module. A module is analogous to dynamically loaded libraries for the device. After loading into the module, extract a specific kernel with cuModuleGetFunction. It is not uncommon for multiple kernels to reside in PTX.
# Load PTX as module data and retrieve function ptx = np.char.array(ptx) err, module = cuda.cuModuleLoadData(ptx.ctypes.get_data()) err, kernel = cuda.cuModuleGetFunction(module, b"saxpy")
Next, get all your data prepared and transferred to the GPU. For increased application performance, you can input data on the device to eliminate data transfers. For completeness, this example shows how you would transfer data to and from the device.
NUM_THREADS = 512 # Threads per block NUM_BLOCKS = 32768 # Blocks per grid a = np.array([2.0], dtype=np.float32) n = np.array(NUM_THREADS * NUM_BLOCKS, dtype=np.uint32) bufferSize = n * a.itemsize hX = np.random.rand(n).astype(dtype=np.float32) hY = np.random.rand(n).astype(dtype=np.float32) hOut = np.zeros(n).astype(dtype=np.float32)
With the input data a, x, and y created for the SAXPY transform device, resources must be allocated to store the data using cuMemAlloc. To allow for more overlap between compute and data movement, use the asynchronous function cuMemcpyHtoDAsync. It returns control to the CPU immediately following command execution.
Python doesn’t have a natural concept of pointers, yet cuMemcpyHtoDAsync expects void*. Therefore, XX.ctypes.get_data retrieves the pointer value associated with XX.
err, dXclass = cuda.cuMemAlloc(bufferSize) err, dYclass = cuda.cuMemAlloc(bufferSize) err, dOutclass = cuda.cuMemAlloc(bufferSize) err, stream = cuda.cuStreamCreate(0) err, = cuda.cuMemcpyHtoDAsync( dXclass, hX.ctypes.get_data(), bufferSize, stream ) err, = cuda.cuMemcpyHtoDAsync( dYclass, hY.ctypes.get_data(), bufferSize, stream )
With data prep and resources allocation finished, the kernel is ready to be launched. To pass the location of the data on the device to the kernel execution configuration, you must retrieve the device pointer. In the following code example, int(dXclass) retries the pointer value of dXclass, which is CUdeviceptr, and assigns a memory size to store this value using np.array.
Like cuMemcpyHtoDAsync, cuLaunchKernel expects void** in the argument list. In the earlier code example, it creates void** by grabbing the void* value of each individual argument and placing them into its own contiguous memory.
# The following code example is not intuitive # Subject to change in a future release dX = np.array([int(dXclass)], dtype=np.uint64) dY = np.array([int(dYclass)], dtype=np.uint64) dOut = np.array([int(dOutclass)], dtype=np.uint64) args = [a, dX, dY, dOut, n] args = np.array([arg.ctypes.get_data() for arg in args], dtype=np.uint64)
Now the kernel can be launched:
err, = cuda.cuLaunchKernel( kernel, NUM_BLOCKS, # grid x dim 1, # grid y dim 1, # grid z dim NUM_THREADS, # block x dim 1, # block y dim 1, # block z dim 0, # dynamic shared memory stream, # stream args.ctypes.get_data(), # kernel arguments 0, # extra (ignore) ) err, = cuda.cuMemcpyDtoHAsync( hOut.ctypes.get_data(), dOutclass, bufferSize, stream ) err, = cuda.cuStreamSynchronize(stream)
The cuLaunchKernel function takes the compiled module kernel and execution configuration parameters. The device code is launched in the same stream as the data transfers. That ensures that the kernel’s compute is performed only after the data has finished transfer, as all API calls and kernel launches within a stream are serialized. After the call to transfer data back to the host is executed, cuStreamSynchronize is used to halt CPU execution until all operations in the designated stream are finished.
# Assert values are same after running kernel
hZ = a * hX + hY
if not np.allclose(hOut, hZ):
raise ValueError("Error outside tolerance for host-device vectors")
Perform verification of the data to ensure correctness and finish the code with memory clean up.
err, = cuda.cuStreamDestroy(stream) err, = cuda.cuMemFree(dXclass) err, = cuda.cuMemFree(dYclass) err, = cuda.cuMemFree(dOutclass) err, = cuda.cuModuleUnload(module) err, = cuda.cuCtxDestroy(context)
Performance is a primary driver in targeting GPUs in your application. So, how does the above code compare to its C++ version? Table 1 shows that the results are nearly identical. NVIDIA NSight Systems was used to retrieve kernel performance and CUDA Events was used for application performance.
The following command was used to profile the applications:
nsys profile -s none -t cuda --stats=true
| C++ | Python | |
| Kernel execution | 352µs | 352µs |
| Application execution | 1076ms | 1080ms |
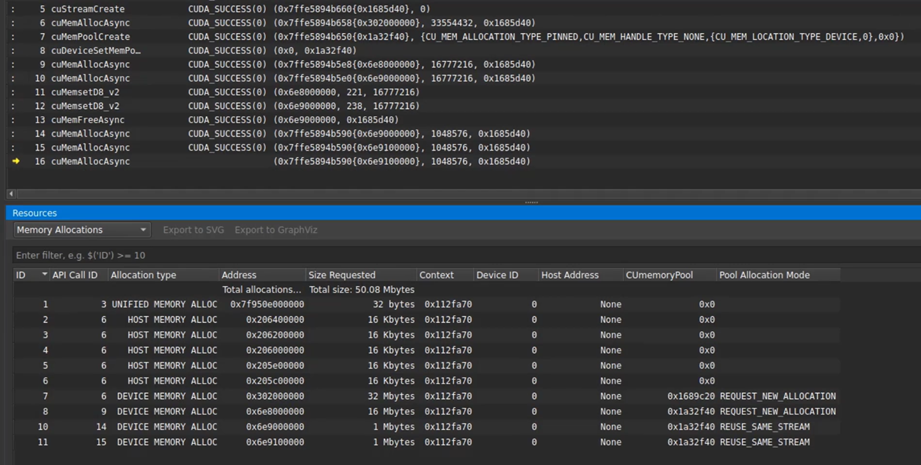
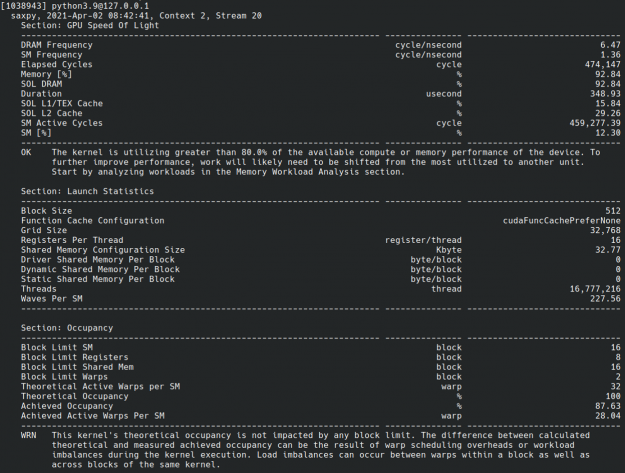
CUDA Python is also compatible with NVIDIA Nsight Compute, which is an interactive kernel profiler for CUDA applications. It allows you to have detailed insights into kernel performance. This is useful when you’re trying to maximize performance (Figure 1).
CUDA Python coming soon, along with a detailed description of APIs, installation notes, new features, and examples. For more information, see the following posts:
Special thanks to Vladislav Zhurba, a CUDA Python developer, for his help on the examples provided in this post.
 Catch the latest announcements from NVIDIA CEO Jensen Huang
Catch the latest announcements from NVIDIA CEO Jensen Huang